CAN协议详解:汽车行业通信解决方案
需积分: 45 46 浏览量
更新于2024-07-25
收藏 1.87MB PDF 举报
CAN协议完全讲解是一份由瑞萨科技发布的应用手册,旨在为CAN总线的初学者提供全面的入门资料。该指南于2006年2月更新至Rev.1.00版本,主要介绍了CAN(Controller Area Network,控制器局域网络)这一在汽车行业广泛应用的串行通信协议。
1. 概述:
- CAN是一种ISO国际标准化的协议,最初由博世公司在1986年为满足汽车行业中对安全、舒适性和效率提升的需求而设计。
- 随着汽车电子系统的复杂度增加,多个独立总线系统导致线束增多,CAN协议的出现是为了减少线束数量并实现高效、可靠的通信。
2. 使用注意事项:
- 该文档基于博世公司的CAN概述和协议,但不为具有CAN功能的产品提供技术保证或责任声明,仅作为实际应用参考。
3. CAN基础知识:
- 它的应用示例广泛,包括发动机控制、故障诊断、车身电子设备等。
- 总线拓扑图展示了不同节点如何通过CAN连接,包括星型、环形和混合拓扑。
4. CAN特点:
- 高速传输(高达1Mbps),适合实时性要求高的系统。
- 低数据传输率时,能处理高噪声环境。
- 单向或多向通信,具有较强的错误检测和处理机制。
5. 错误处理:
- 提供了多种错误状态分类,如数据帧错误、远程帧错误、溢出错误等。
- 包含错误计数值的概念,用于检测和处理错误情况。
6. CAN协议细节:
- 分析了数据帧、遥控帧、错误帧、过载帧以及帧间隔的定义和工作原理。
- 介绍如何根据优先级决定数据发送顺序。
- 位填充和位时序规则确保数据正确无误地传输。
- 描述了同步方法,包括硬件同步、再同步和调整同步规则的过程。
通过这份指南,学习者能够深入了解CAN协议的工作原理、标准规格、错误处理机制以及实际应用中的实施要点,对于从事汽车电子、工业自动化等领域的人来说,这是一份不可或缺的参考资料。
应用手册
RCJ05B0027-0100/Rev.1.00 2006.02 Page 8 of 48
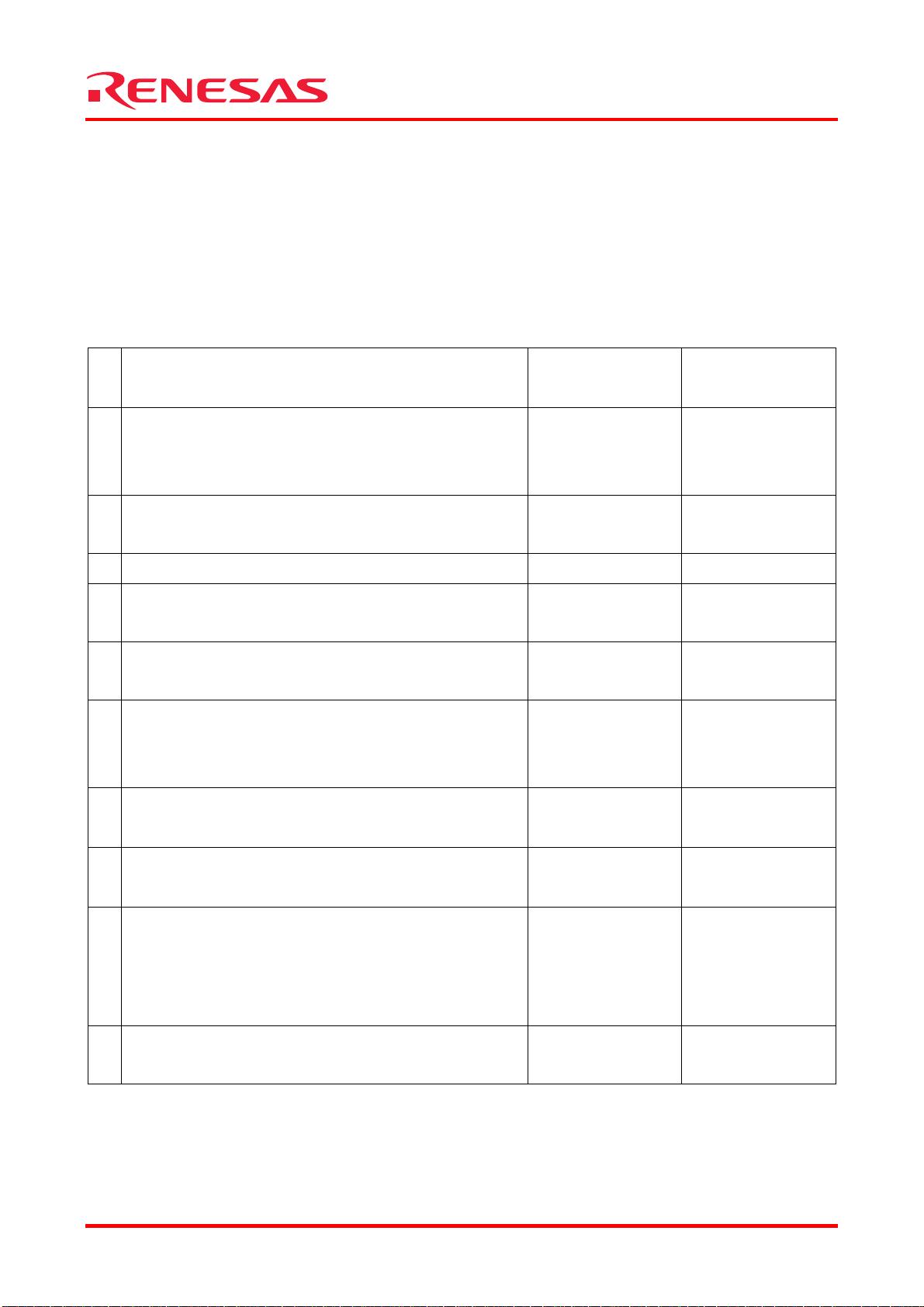
5.2 错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表 2 所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
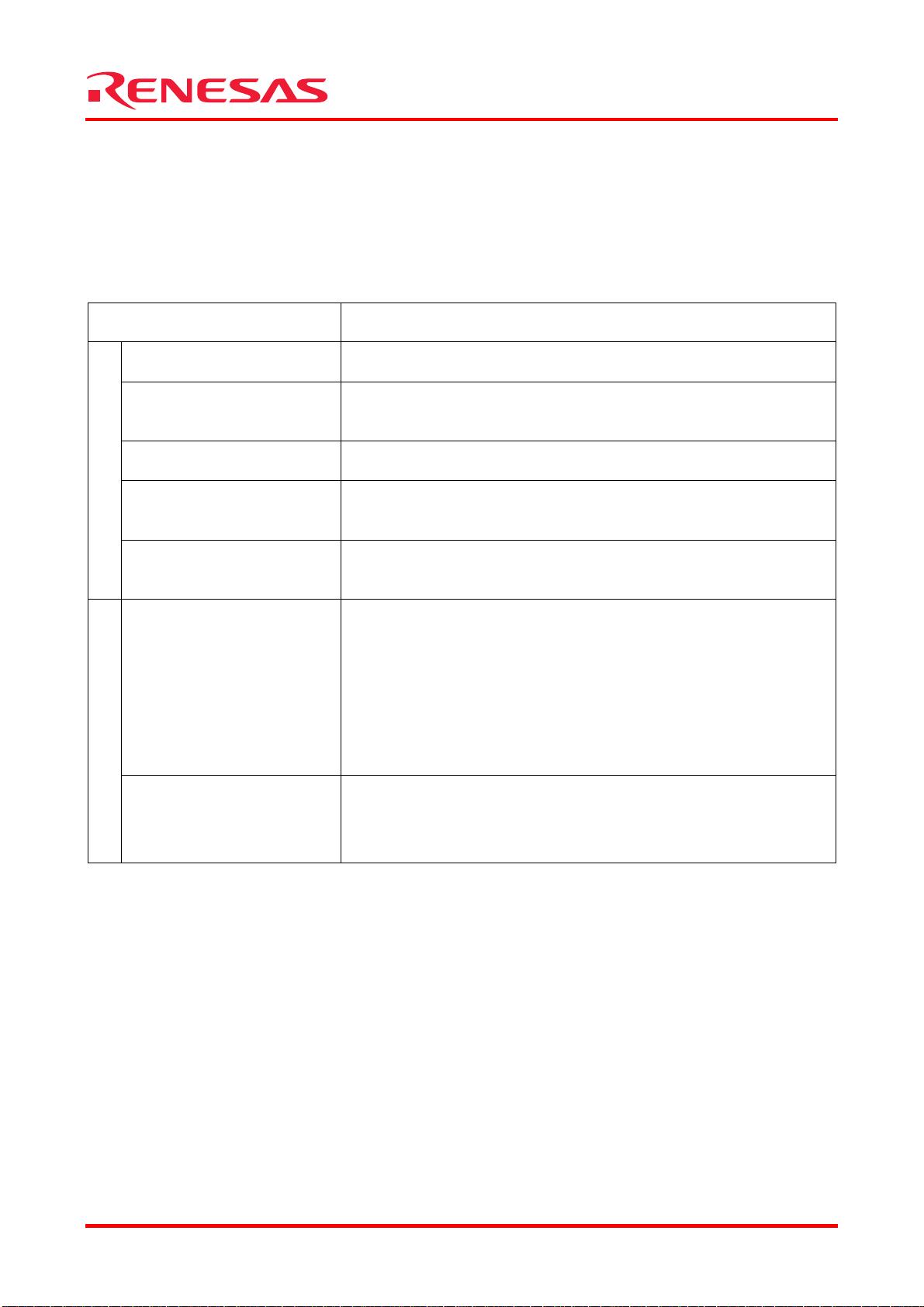
表 2. 错误计数值的变动条件
接受和发送错误计数值的变动条件 发送错误计数值
(TEC)
接收错误计数值
(REC)
1 接收单元检测出错误时。
例外:接收单元在发送错误标志或过载标志中检测出“位
错误”时,接收错误计数值不增加。
+1
2 接收单元在发送完错误标志后检测到的第一个位为显性电
平时。
+8
3 发送单元在输出错误标志时。 +8
4 发送单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
5 接收单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
6 各单元从主动错误标志、过载标志的最开始检测出连续 14
个位的显性位时。
之后,每检测出连续的 8 个位的显性位时。
发送时
+8
接收时
+8
7 检测出在被动错误标志后追加的连续 8 个位的显性位时。 发送时
+8
接收时
+8
8 发送单元正常发送数据结束时(返回 ACK 且到帧结束也未
检测出错误时)。
−1
TEC=0 时±0
9 接收单元正常接收数据结束时(到 CRC 未检测出错误且正
常返回 ACK 时)。
1≤REC≤127 时-1
REC=0 时±0
REC>127 时
设 REC=127
10 处于总线关闭态的单元,检测到 128 次连续 11 个位的隐
性位。
TEC=0
REC=0
剩余48页未读,继续阅读
213 浏览量
2021-09-10 上传
2021-10-15 上传
2021-10-10 上传
2010-08-17 上传
2018-12-19 上传

lhrace
- 粉丝: 6
- 资源: 36
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
