
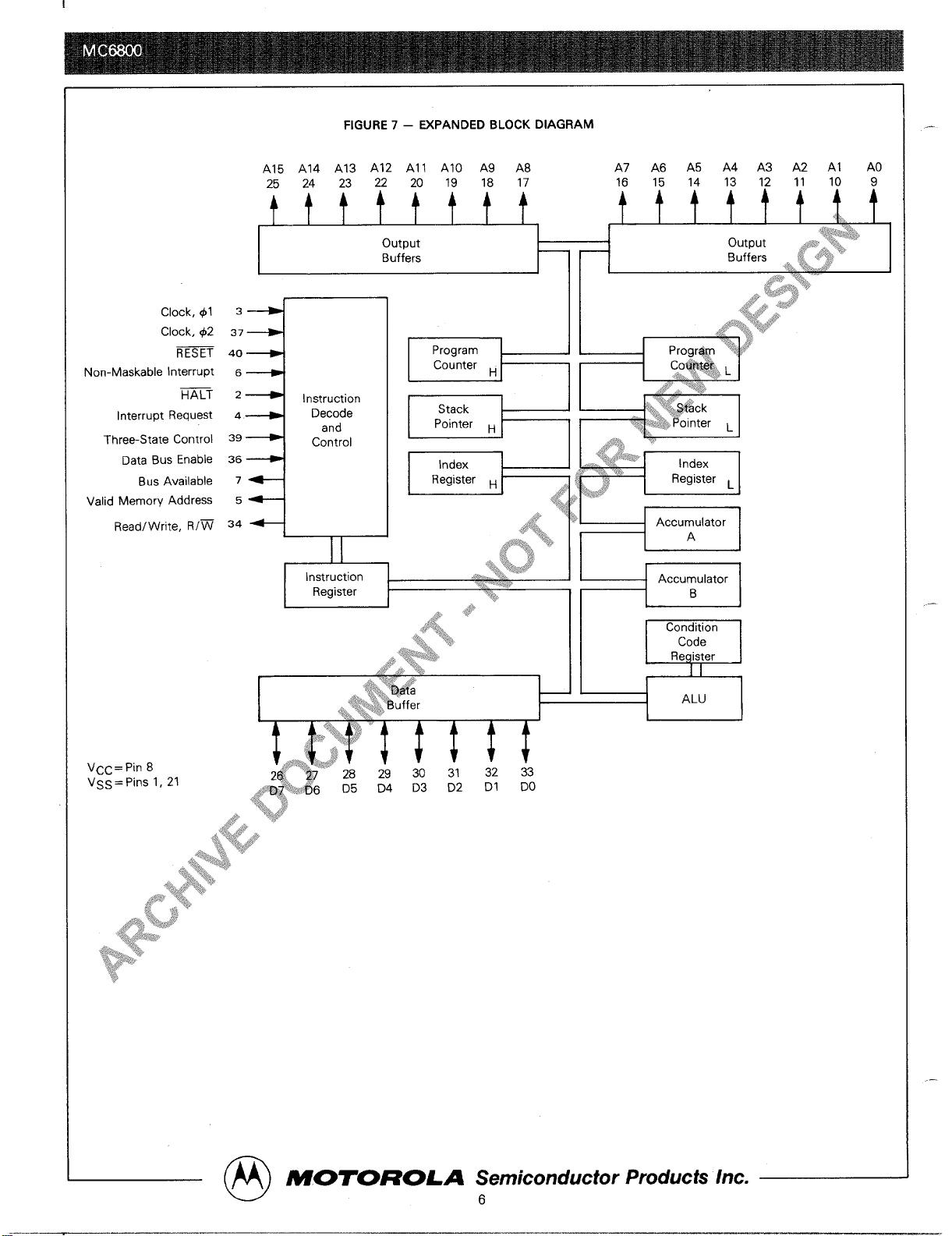
MPU SIGNAL DESCRIPTION
Proper operation of the MPU requires that certain control
and timing signals be provided to accomplish specific func-
tions and that other signal lines be monitored to determine
the state of the processor.
Clocks Phase One and Phase Two (o1, 42) – Two pins
are used for a two-phase non-overlapping clock that runs at
the VCC voltage level.
Figure 1 shows the microprocessor clocks. The high level
is specified at VIHC and the low level is specified at VILC.
The allowable clock frequency is specified by f (frequency).
The minimum @l and @2 high level pulse widths are specified
by PW~H (pulse width high time). To guarantee the required
access time for the peripherals, the clock up time, tut, is
specified. Clock separation, td, is measured at a maximum
voltage of VOV (overlap voltage), This allows for a multitude
of clock variations at the system frequency rate.
Address Bus (AOA15) – Sixteen pins are used for the ad-
dress bus. The outputs are three-state bus drivers capable of
driving one standard TTL load and 90 pF. When the output is
turned off, it is essentially an open circuit. This permits the
MPU to be used in DMA applications. Putting TSC in its high
state forces the Address bus to go into the three-state mode.
Data Bus (DO-D7) – Eight pins are used for the data bus.
It is bidirectional, transferring data to and from the memory
and peripheral devices. It also has three-state output buffer$
capable of driving one standard TTL load and 130 pF. D,a~$,
Bus is placed in the three-state mode when DBE is Io#t\,t w~$.
,{’.y...:>.:>,,:!:.?..
.+,.‘+:+”‘ ‘$,.?
Data Bus Enable (DBE) – This level sensitive i~[~t~$sthe
three-state control signal for the M PU data ~$~l:~yd will
enable the bus drivers when in the high st~:&$$@j9 Input is
TTL compatible; however in normal op~,atib~~$twould be
driven by the phase two clock. Durin&@n~~,K~ read cycle,
the data bus drivers will be disabled,’~~t~nal ly. When it is
desired that another device contr$PtR~&ata bus, such as in
Direct Memory Access (DMA)j+~k~@~ions, DBE should be
held low.
~t~
.>.:,:,.,,, ,x.
If additional data setup+p[+ho~d~?me is required on an MPU
write, the DB E
down ,~,~~ @n be decreased, as shown in
Figure 3 (DBE#@2\R:~~e~inimum down time for DBE is
tDB E as shown, ~~~.s}~ting D B E with respect to E, data
setup or hold t~,$@# be increased.
\\\$.
;>L:.,.?J~,
Bus Ay~i$~l~.(bA) – The Bus Available signal will nor-
mally ~%~ ~}$’low state; when activated, it will go to the
..,*.’:* Y
high.?ata~:+indicating that the microprocessor has stopped
* “’“’*’l+
and @,@tfhe address bus is available. This will occur if the
HALT~ne is in the low state or the processor is in the WAIT
state as a result of the execution of a WAIT instruction. At
such time, all three-state output drivers will go to their off
state and other outputs to their normally inactive level. The
processor is removed from the WAIT state by the occurrence
of a maskable (mask bit I = O) or nonmaskable interrupt, This
output is capable of driving one standard TTL load and
30 pF. If TSC is in the high state, Bus Available will be low,
Read/Write (R/~) – This TTL compatible output signals
the peripherals and memory devices wether the MPU is in a
@
MOTOROLA
Read (high) or Wrile (low) state, The normal standby state of
this signal is Read (high). Three-State Control going high will
turn Read/Write to the off (high impedance) state. Also,
when the processor is halted, it will be in the off state. This
output is capable of drivina one standard TTL Ioa&?iqnd
90 pF.
~+,r+i~ .:}
RESET – The RESET input is used to rese~&}N~&~rt the
M PU from a power down condition resulti~~,jf~% a power
failure or initial start-up of the processor,+:~@l%~i&el sensitive
input can also be used to reinitialize t,$~~~~~ne
at any time
after start-up.
.)’ k%}?*
:t:;l,\ \
If a high level is detected in th~ Inpw; this will signal the
MPU to begin the reset seqe~$~. During the reset se-
quence, the contents of th,~?%f$wb locations (FFFE, FFFF)
in memory will be loade@{~~&,Jtie Program Counter to point
to the beginning of..,$~b.:wet routine. During the reset
~.\J~t.~,,~y..
routine, the interrupt ~s~ bit is set and must be cleared
under program c~~ol, before the M PU can be interrupted by
IRQ. While ‘K%Jk’’low
(assuminga minimum of8 clock
cycles have ~Jcc~$r8d) the MPU output signals will be in the
followinqj$&MVMA= low, BA= low, Data Bus= high im-
peda~~e,>~~~= high (read state), and the Address Bus will
con$&8 the ‘reset address FFFE. Figure 8 illustrates a power
?}4
&“~q@~nce using the RESET control line. After the power
~i.
~,P@ reaches 4.75 V, a minimum of eight clock cycles are
?$:jlj$~qtiired for the processor to stabilize in preparation for
‘~trestarting. During these eight cycles, VMA will be in an in-
.lp~
determinate state so any devices that are enabled by VMA
which could accept a false write during this time (such as
battery-backed RAM) must be disabled until VMA is forced
low after eight cycles. RESET can go high asynchronously
with the system clock any time after the eighth cycle.
RESET timing is shown in Figure 8. The maximum rise and
fall transition times are specified by tpcr and tpcf. If RESET
is high at tpcs (processor control setup time), as shown in
Figure 8, in any given cycle then the restart sequence will
begin on the next cycle as shown. The RESET control line
may also be used to reinitialize the MPU system at any time
during its operation. This is accomplished by pulsing RESET
low for the duration of a minimum of three complete 42
cycles. The RESET pulse can be completely asynchronous
with the MPU system clock and will be recognized during 42
if setup time tpcs is met.
Interrupt Request (~Q) – This level sensitive input re-
quests that an interrupt sequence be generated within the
machine. The processor will wait until it completes the cur-
rent instruction that is being executed before it recognizes
the request. At that time, if the interrupt mask bit in the Con-
dition Code Register is not set, the machine will begin an in-
terrupt sequence. The Index Register, Program Counter, Ac-
cumulators, and Condition Code Register are stored away on
the stack. Next, the MPU will respond to the interrupt re-
quest by setting the interrupt mask bit high so that no further
interrupts may occur. At the end of the cycle, a 16-bit ad-
dress will be loaded that points to a vectoring address which
is located in memory locations FFF8 and FFF9. An address
loaded at these locations causes the MPU to branch to an in-
terrupt routine in memory. Interrupt timing is shown in
Figure 9.
Semiconductor Products Inc.
7

 我的内容管理
展开
我的内容管理
展开







