ISO22839智能交通系统中文解析:前车碰撞缓解系统
"AEB国际标准中文版是关于智能辅助驾驶中碰撞预警及紧急制动系统,特别是ISO22839-FVCMS的中文翻译文档。文档内容涉及车辆前向碰撞缓解系统(FVCMS)的功能、运行原理、性能验证以及相关测试标准。"
在智能驾驶领域,国际标准ISO22839智能交通系统-前车碰撞缓解系统(FVCMS)是一项重要的技术规范。FVCMS的主要目标是减少与前车发生的严重碰撞,以及降低碰撞概率。它依赖于与前车的距离、前车和自身车辆的动作、驾驶员意图和操作等信息来评估潜在的危险情况。一旦系统判断驾驶员无法及时应对,且满足特定条件,FVCMS会自动执行刹车以减轻碰撞的影响。
FVCMS不仅能够独立工作,还可以与其他智能驾驶辅助系统集成。标准中规定了FVCMS的运行策略、最小功能要求、系统需求、接口规范以及测试方法。系统设计者可以根据这些标准来开发功能,以确保在各种条件下都能有效运作。FVCMS的主要作用是减少尾部碰撞的能量,从而降低车辆损坏和人员伤亡的风险。同时,它还能提高其他防撞系统的效率,如安全气囊和安全带等。
本标准还提到了FVCMS的适用范围,主要针对公开和非公开道路上的单轨迹车辆(如汽车)以及具有2个或3个拖车的卡车,但不适用于越野等非公路环境。此外,虽然FVCMS能在一定程度上辅助驾驶,但车辆安全驾驶的首要责任仍然在于驾驶员。
引用的其他ISO标准,如ISO15622、ISO15623和ISO22179,可能涉及了与FVCMS相关的技术细节,如自适应巡航控制、车辆分类和刹车系统等方面,这些标准共同构成了智能驾驶领域的基础框架。
AEB国际标准中文版提供的ISO22839-FVCMS详细介绍了智能辅助驾驶中的关键技术,对于理解FVCMS的工作原理、设计原则以及测试要求具有重要意义。这份文档不仅对汽车行业专业人士,也对广大驾驶员了解车辆安全技术有极大的参考价值。
3.16 FVCMS 前向碰撞缓解系统
3.17 FVCWS 前向碰撞预警系统
3.18 Heavy vehicle 重型车辆
3.19 Jerk 距离对时间的 3 阶倒数(加速度的变化速度,m/s
3
)
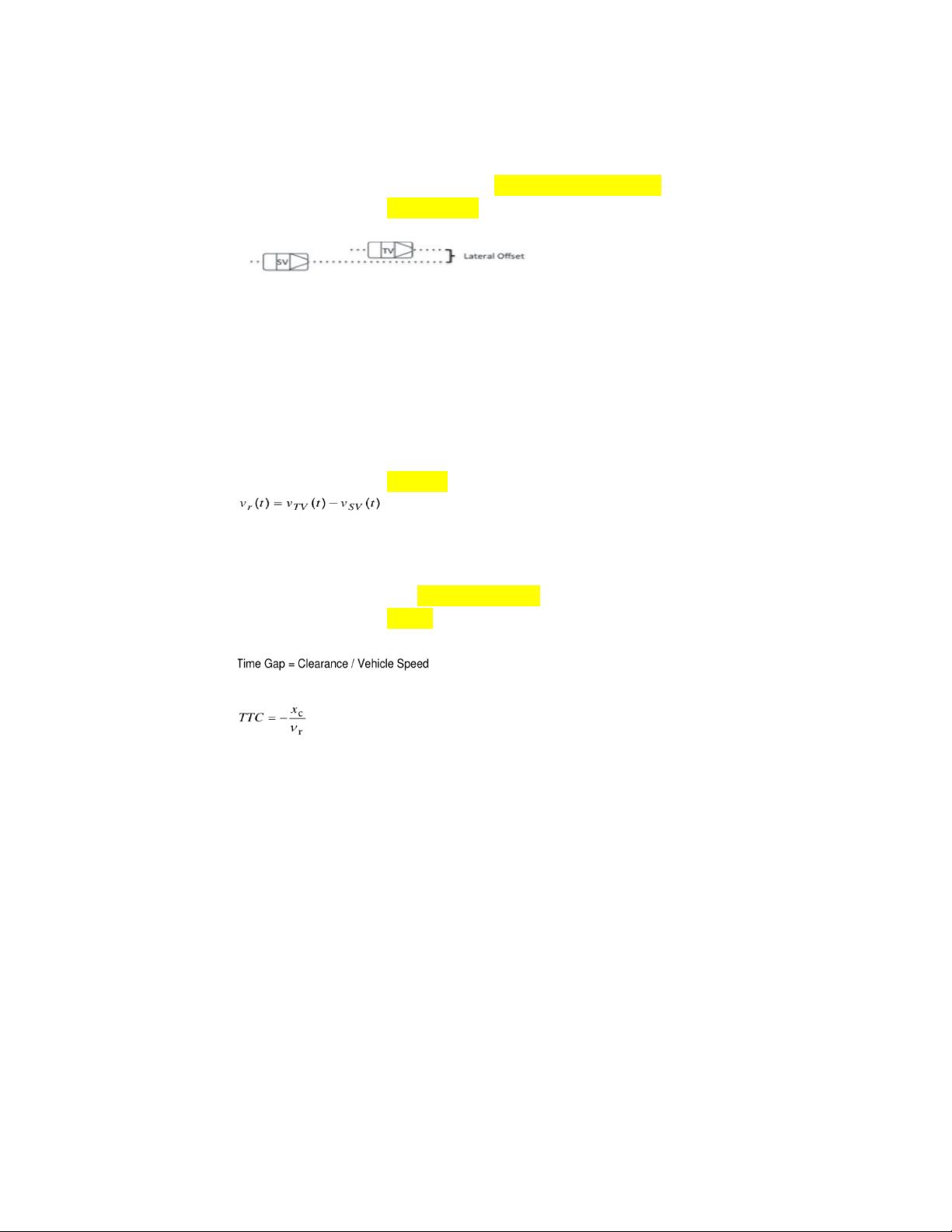
3.20 Lateral offset 侧向两车距离
3.21 Light vehicle 轻型车
3.22 MB mitigation braking 缓解碰撞制动(满足最小需求的紧急刹车,等级高)
3.23 MCAP minimum countermeasure action point 最小策略执行点
3.24 Minimum FVCMS deceleration FVCMS 执行的最小减速度
3.25 Minimum velocity 最小速度
3.26 Override 重启
3.27 PUP pre-collision urgency parameter 预碰撞紧急参数
3.28 Rear-end collision 追尾
3.29 Relative velocity 相对速度
3.30 Required deceleration 减速度请求
3.31 Single track vehicle 单轨迹车辆
3.32 SRB speed reduction braking 减速刹车
3.33 SV subject vehicle 本车(实验车辆)
3.34 TV target vehicle 目标车
3.35 Time gap 时间间隙
3.36 TTC time to collision 碰撞时间(相对速度恒定)
3.37 Truck-tractor 卡车牵引车
3.38 Unit truck
3.39 WB warning braking 刹车告警(刹车并告警,提醒驾驶员碰撞危险)
剩余18页未读,继续阅读
2023-07-03 上传
2023-11-16 上传
2023-03-31 上传
2023-07-06 上传
2023-07-11 上传
2023-05-23 上传


youhumaple
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- BPHero_UWB_Location_SourceCode_V1.1_16MHz.rar
- phaser-ui-comps:Adobe Animate构建的Phaser 3 UI组件
- jquery-personality-quiz:jQuery个性测验插件
- cpp代码-串行FCM算法代码
- matlab分时代码-Deep-Subspace-Clustering:说明待定
- uh-data-structures:用于创建自定义数据结构的大学项目
- FlowInspector:在公共场所共享有关Flow Inspector Mac OS应用程序的知识
- BPHero_UWB_Location_SourceCode_V1.1_16MHz_V1.3.1.rar
- ffmepg3.0_Demo.zip
- my-dockerfiles
- 绿色渐变通用商务PPT模板
- raspberryPiE-InkDisplay:使用Raspberry Pi从我设置的Firebase数据库中获取报价(通过使用数据库上的API端点获取报价),当前在Spotify上播放的歌曲以及我所在城市的当前天气,并将其显示在Inky pHAT上电子墨水显示
- 娟娟
- com.niledb.core:用Java编写的基于PostgreSQL和GraphQL的开源数据后端
- 路由器:RubyRack HTTP路由器
- BPHero_UWB_Location_SourceCode_V1.1_16MHz_V1.3.rar
