歧管测绘机:一种非线性分类新框架
186 浏览量
更新于2024-07-15
收藏 1.22MB PDF 举报
"歧管测绘机,也称为Manifold Mapping Machine (M3),是一种用于非线性分类的机器学习框架,由Ping Hea、Xiaohua Xu和Ling Chen等人提出。该研究论文主要探讨了如何将线性分类器转化为非线性分类器的方法,以解决传统线性模型在处理非线性数据时的局限性。"
在过去的几十年中,非线性分类一直是机器学习领域的一项重要任务。由于很多实际问题的数据分布往往具有复杂的非线性结构,传统的基于内积的线性分类器在处理这类问题时往往表现不佳。近年来,核方法的出现为这个问题提供了一种解决方案,它能够通过将数据映射到高维或无限维特征空间来实现非线性分类。然而,这种隐式的空间变换和不可观察的潜在特征空间使得人们对核机器的工作机制理解困难。
论文中提出的歧管测绘机(M3)框架,旨在提供一个直观且可理解的非线性分类器设计方法。M3的核心思想是将任何线性分类器扩展到非线性环境,这样既保留了线性模型的简单性和可解释性,又能处理非线性问题。M3通过映射数据到流形(manifold)上,利用流形的特性来揭示数据内在的非线性结构,从而实现有效的非线性分类。
具体来说,M3利用谱分析技术在数据的流形空间中进行操作。谱空间分析能够揭示数据点之间的拓扑关系,帮助识别出隐藏在复杂数据集中的低维流形结构。这种方法允许M3在保持对分类器工作原理理解的同时,适应非线性数据的复杂性。
文章详细讨论了M3的设计原理、算法实现以及可能的应用场景。通过实例和实验结果,作者证明了M3在非线性分类任务上的有效性,并与其他流行的非线性分类方法进行了比较。此外,M3的灵活性使得它可以与其他机器学习算法结合,为解决更广泛的机器学习问题提供了新的思路。
"歧管测绘机"是一项重要的研究进展,它为理解和设计非线性分类器提供了一个直观的途径,有助于推动机器学习领域的理论发展和实践应用。
new manifold. For example, a classifier with rectangle decision
boundaries is not suitable if the new manifold is a hypersphere.
Second, the kernel classifiers are deprecated, because there is no
reason to use a more complex classifier than necessary, besides
it makes no sense to increase the data dimension after just
reducing it.
2.3. Out-of-sample extension
To extend the built classifier to the out-of-sample examples, M
3
first maps the test data X
T
onto the same manifold as where Z
S
locates, and then classifies the transformed test data Z
T
with the
classifier built in the classifier construction stage.
Fig. 1 illustrates the diagram of the manifold mapping of out-of-
sample examples. Different from the training data mapped from
the original manifold M to the target manifold H via the supervised
manifold mapping function f, the test data fails to be mapped in the
same way, because it does not have the supervised information that
f requires. To extend the supervised manifold mapping of f to the
out-of-sample test data, we construct an intermediate manifold N
between M and H as their bridge to establish an unsupervised
connection between them. The prerequisite is that there exist a
manifold mapping
z
from M to N , a manifold mapping
Z
from H to
N and its inverse mapping
Z
1
. By forcing the image of M on N to
be consistent with the image of H on N , the unsupervised
relationship between M and H can be formulated with the
mapping of
z
and
Z
1
.
The following Consistent Mapping Principle provides the deter-
mination of the best map point of arbitrary test data from manifold
M to manifold H based on the idea described above.
Definition 2 (Consistent Mapping Principle). Suppose xA X
T
is an
arbitrary test data point on manifold M, the best map point of x on
manifold H, denoted as z
, should be
z
¼ arg min
z
J
z
X
S
ðxÞ
Z
Z
S
ðzÞJ
2
ð5Þ
where
z
X
S
ðxÞ :
R
N
-
R
m
ð6Þ
is the relationship between X
S
and x A M, and
Z
Z
S
ðzÞ :
R
d
-
R
m
ð7Þ
is the relationship between Z
S
and an arbitrary data point zA H.
By defining the intermediate manifold N as the local coordinate
space of the test data, Consistent Mapping Principle minimizes the
difference between local coordinate of the test data on H and its
local coordinate on M. Therefore, the best map point of xA X
T
onto
H is the one that can best preserve the relationship of x with the
training data on M.
Although in theory the functions
z
X
S
and
Z
Z
S
should reflect the
manifold structure of M and H respectively, the fact is in most
cases little is known about the structure of M, while relatively
more information can be obtained about the structure of H from the
supervised manifold mapping function f. As a result,
z
X
S
can choose
some metric which is universally applicable to different data sets,
while
Z
Z
S
must be selected under the restriction of the known
structure of H.
3. Spectral method
Spectral method is proposed on the foundation of spectral graph
theory [27]. Its basic idea is to transform the graph segmentation
problem to the eigenvalue problem of Laplacian matrix. The
advantage of spectral method lies in its outstanding graph partition
ability without estimating any explicit model of the data
distribution.
Consider an undirected weighted graph G ¼ðV, E, WÞ with V the
vertex set, E the edge set, and W the similarity set. The problem of
graph segmentation refers to dividing G into p unconnected
subgraphs fG
1
, ..., G
p
g, so that their inner-cluster similarity can
be maximized while their outer-cluster similarity is minimized.
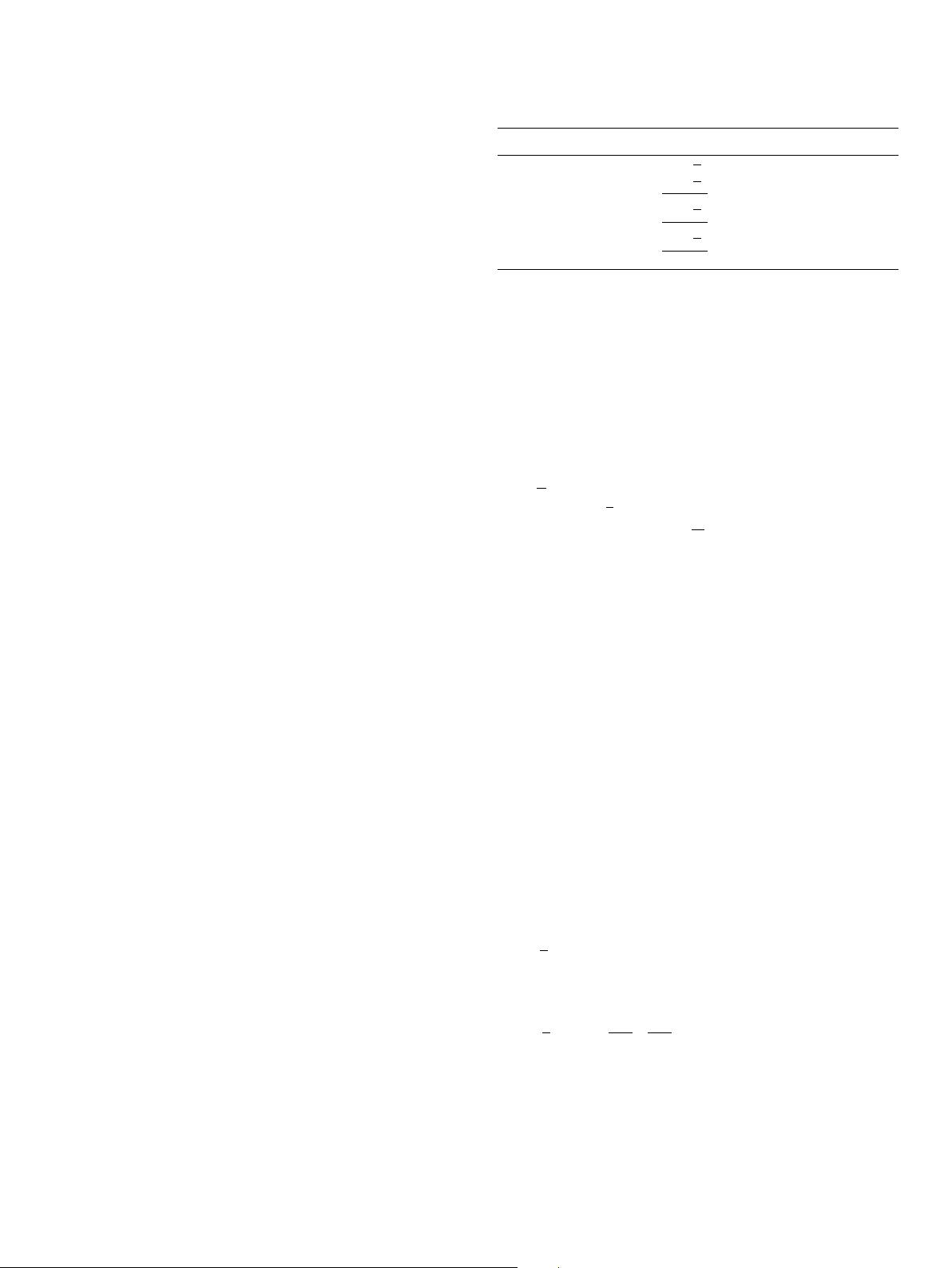
Four well-known graph partition criteria have been proposed,
including Min Cut [28], Ratio Cut [29] , Normalized Cut [30] and
Min-Max Cut [31]. Their objectives and solutions are summarized
in Table 1, in which V
i
represents the vertex set of G
i
,
cutðV
i
, V
i
Þ¼
X
i A V
i
, j A V
i
w
ij
ð8Þ
is the similarity between V
i
and V
i
¼ V=V
i
, jV
i
j is the number of the
vertices in V
i
.
Definition 3 ( Laplacian matrix). The Laplacian matrix of graph G is
L ¼
def
DW ð9Þ
where W ¼ðw
ij
Þ
nn
,
D ¼ diagðW1
n
Þ
¼
d
1
d
2
&
d
n
2
6
6
6
6
4
3
7
7
7
7
5
ð10Þ
with
d
i
¼
X
n
j ¼ 1
w
ij
ð11Þ
Definition 4 (Normalized Laplacian matrix). The normalized
Laplacian matrix of graph G is
L ¼
def
D
1=2
LD
1=2
¼ ID
1=2
WD
1=2
ð12Þ
Property 5. The Laplacian matrix L satisfies that 8 f A
R
n
f
T
Lf ¼
1
2
X
n
i, j ¼ 1
w
ij
ðf
i
f
j
Þ
2
ð13Þ
Property 6. The normalized Laplacian matrix L satisfies that 8 f A
R
n
f
T
Lf ¼
1
2
X
n
i, j ¼ 1
w
ij
f
i
ffiffiffiffi
d
i
p
f
j
ffiffiffiffi
d
j
q
0
B
@
1
C
A
2
ð14Þ
The eigenvector solutions of the multiway-cut criteria are
usually collected in an indicating matrix F for post-processing,
such as k-means clustering.
F ¼½v
1
v
2
v
p
ð15Þ
By far, there are three different graph construction methods that
are most regularly used in the spectral method.
Table 1
Objectives and solutions of four multiway-cut graph partition criteria.
Criteria Minimization objective Relaxed solution
Min Cut
P
p
i ¼ 1
cutðV
i
, V
i
Þ
min
v
1
,..., v
p
Lv ¼
l
v
Ratio Cut
P
p
i ¼ 1
cutðV
i
, V
i
Þ
jV
i
j
min
v
1
,..., v
p
Lv ¼
l
v
Normalized Cut
P
p
i ¼ 1
cutðV
i
, V
i
Þ
cutðV
i
, VÞ
min
v
1
,..., v
p
Lv ¼
l
Dv
Min–Max Cut
P
p
i ¼ 1
cutðV
i
, V
i
Þ
cutðV
i
, V
i
Þ
min
v
1
,..., v
p
Lv ¼
l
Wv
P. He et al. / Neurocomputing 74 (2011) 1450–1466 1453
剩余16页未读,继续阅读
2021-09-13 上传
2021-09-18 上传
2010-12-13 上传
2021-09-30 上传
2020-05-02 上传
2021-09-30 上传
2020-07-07 上传

weixin_38519387
- 粉丝: 3
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
