第八届飞思卡尔智能车竞赛规则修订与分组详解
下载需积分: 0 | DOC格式 | 2.26MB |
更新于2024-09-12
| 160 浏览量 | 举报
第八届全国大学生“飞思卡尔”杯智能汽车竞赛是一场以飞思卡尔半导体公司的微控制器为核心的高技能竞赛。参赛者需使用竞赛秘书处提供的三种不同类型的车模:A型车模(电磁组),采用G768车模和RS380电机、FUTABA舵机,适用于通过感应电磁场来检测赛道;B型车模(摄像头组),搭载540电机和S-D5伺服器,利用摄像头进行赛道图像采集;以及D型车模(光电平衡组),使用直立行走的特性,专为保持车体平衡而设计。
比赛的核心任务包括传感器信号采集处理、电机驱动、舵机控制和控制算法软件开发,参赛队伍需自行设计并实现一套完整的智能控制系统,确保车辆能在指定赛道上准确行驶。竞赛成绩由赛车完成赛道的实际时间决定,电磁组和摄像头组的比赛方式各有特点:电磁组车模依赖磁场感应,摄像头组则依赖图像分析或连续扫描反射点。光电平衡组则是通过独特的直立行走设计,确保车辆稳定行驶。
所有参赛队伍在获得全国总决赛资格后,还需提交技术报告,展示他们的设计原理和技术实施细节。比赛规则旨在保证公正与公平,对车模的硬件配置和运行模式都有明确规定,如A型车模的前后轮布局,B型车模的反向行驶,以及D型车模的直立行走模式。这样的规则设计旨在考验参赛者的创新思维、工程实践能力和对微控制器的深入理解。
第八届飞思卡尔智能车比赛不仅是一项技术竞技活动,也是一次培养未来工程师实战能力的重要平台,它融合了硬件设计、软件编程、传感器技术等多个领域的知识,充分展示了现代智能汽车技术的魅力。
动 力 轮
转 向 轮
车 模 运 行 方 向
动 力 轮
转 向 轮
车 模 运 行 方 向
图 2 摄车模运行模式
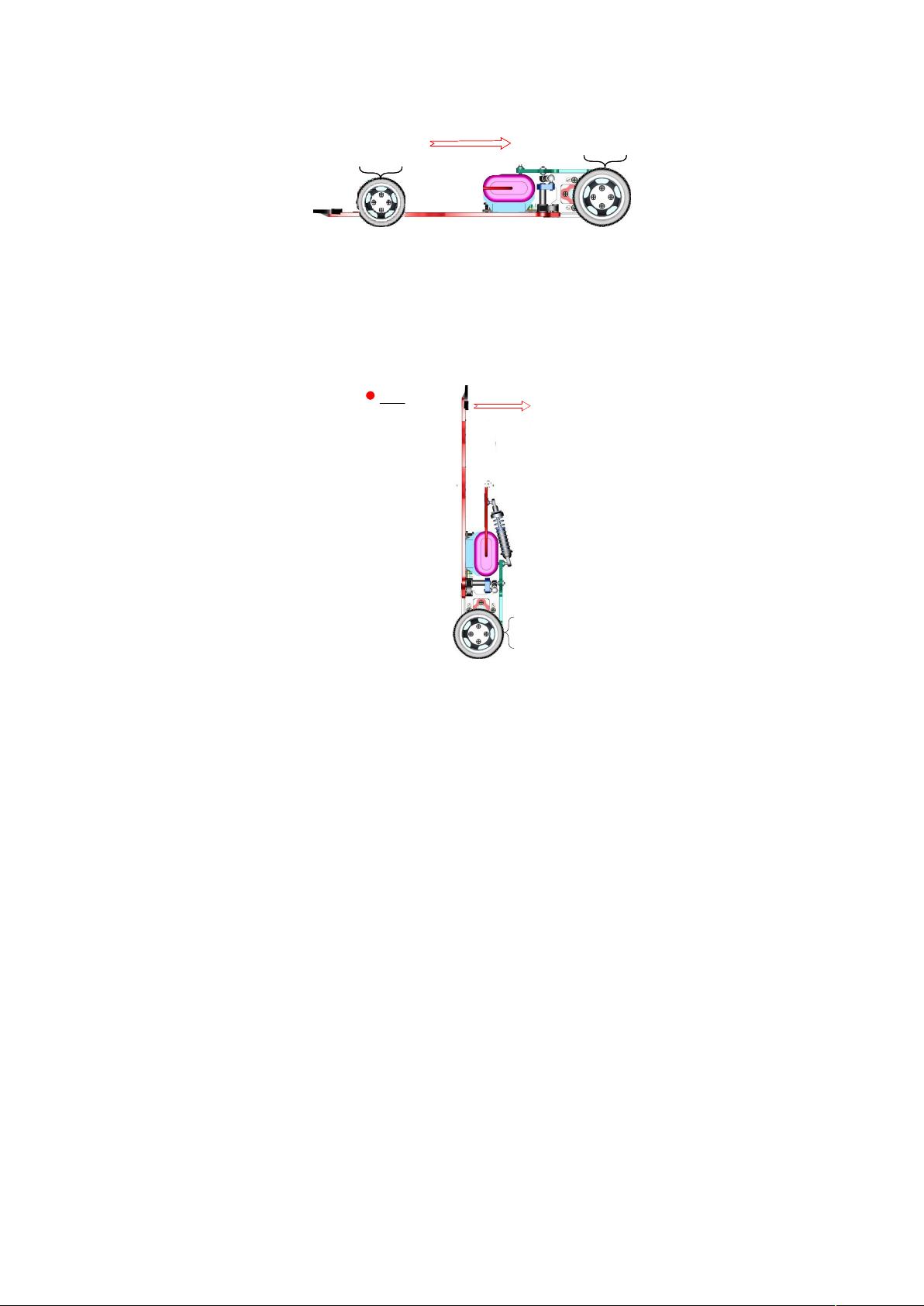
(3) 光电平衡组:车模直立行走。
使用 D 型车模。车模运行时只允许动力轮着地,车模直立行走。车模
运行方向应按照图 3 所示:
C车 模
动 力 轮
车 模 运 行 方 向
原 来 的 转 向
轮 没 有 用 ,
可 以 去 除 掉 。
注意
车 模 请 按
照 图 示 的
方 向 运 行 。
图 3 光平衡组车模运行模式
细节及改动限制见附件一。
2. 须采用飞思卡尔半导体公司的 8 位、16 位、32 位处理器作为唯一的微控制器。
有关细节及其它电子器件使用的限制见附件二;
3. 三个赛题组使用传感器限制:
参加电磁赛题组不允许使用光学传感器获得道路的光学信息,但是可以
使用光电码盘测量车速;
参加光电平衡组的车模可以使用光电传感器、指定型号的线性 CCD 传感
器进行道路检测,禁止使用激光传感器。
光 电 平 衡 组 若 采 用 线 性 CCD , 需 使 用 Texas Advanced Optoelectronic
Solution 公司的 TSL1401 系列的线性 CCD,如下图所示:
3
剩余12页未读,继续阅读
相关推荐







GuXingRenye
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Delphi高手突破(官方版).pdf
- LoadRunner中文版文档
- MATLAB 训练讲义toStudents.pdf
- 计算机操作系统(汤子瀛)习题答案
- 构建SOA 的IT 捷径
- 2002年程序员上午试卷
- 雅思王路807 必备雅思工具
- modelsim编译xilinx库的方法.doc
- 西软宽带安全审计管理软件说明书
- kjava开发手册--介绍j2me开发的一些实践
- H.264.pdf,编码解码
- ASP.NET专业项目实例开发(修订版)-课件(部分3)
- ASP.NET专业项目实例开发(修订版)-课件(部分1)
- cuda中文手册--GPU的通用编程
- 2009最新java经典面试题目(包含答案)
- java设计模式中文版
