GPS与IMU传感器在无人车辆跟踪系统中的应用
版权申诉
105 浏览量
更新于2024-08-04
收藏 191KB PDF 举报
"《基于GPS和IMU传感器的对象追踪》是一篇由Wahyudi、Ngatelan、Meita Sukma Listiyana和Sudjadi四位作者共同完成的研究论文,发表在 Diponegoro University 的电气工程系。该研究主要关注无人驾驶车辆中对象追踪系统的重要性,尤其是在远程操控下监控目标物体的运动,由于距离遥远,实时的位置和姿态信息对于操作者至关重要。
论文的核心焦点是利用全球定位系统(GPS)和惯性测量单元(IMU)传感器来获取对象的位置和姿态信息。IMU是一种集成了加速度计、陀螺仪和磁力计等多种传感器的设备。在IMU系统中,陀螺仪提供角度数据,而加速度计则提供关于物体加速度和方向变化的信息。为了精确地确定物体的姿态,这两类数据需要通过复杂的算法进行融合和处理,这通常涉及到数学模型如卡尔曼滤波器或者扩展卡尔曼滤波器,以减少噪声和提高数据准确性。
GPS主要用于提供精确的三维地理位置,而IMU则提供了关于物体运动的内在状态,如速度、旋转和加速度等,两者结合可以形成一个强大的位置跟踪解决方案,即使在GPS信号不佳或遮挡的情况下也能提供相对稳定的估计。这对于无人驾驶汽车、无人机、机器人等自主移动设备的导航和控制具有重要意义。
论文可能详细讨论了如何设计和实现这样的跟踪系统,包括硬件选型、数据融合算法的优化以及实际应用中的误差分析和性能评估。此外,作者们可能还探讨了如何在不同环境条件下,如多路径效应、传感器漂移等因素下保持系统的稳定性和精度。
这篇论文为理解如何在现代信息技术支持下实现高效、精确的对象追踪系统提供了深入的技术洞察,对提高无人系统自主性和可靠性具有重要的理论和实践价值。"
Tracking Object based on GPS and IMU Sensor
Wahyudi
Department of Electrical Engineering
Diponegoro University
Semarang, Indonesia
wahyuditinom@elektro.undip.ac.id
Ngatelan
Department of Electrical Engineering
Diponegoro University
Semarang, Indonesia
ngatelan@undip.ac.id
Meita Sukma Listiyana
Department of Electrical Engineering
Diponegoro University Semarang,
Indonesia
meitasukma5@gmail.com
Sudjadi
Department of Electrical Engineering
Diponegoro University
Semarang, Indonesia
ksudjadi@gmail.com
Abstract—
Unmanned vehicles required a tracking system
to monitor the movement of the object. Tracking system
required because the object is controlled remotely and the
movement of an object is too far from an operator. This
tracking system requires object location and attitude. Global
Positioning System (GPS) and Inertial Measurement Unit
(IMU) sensor can be used to obtain information about object
location and attitude. This IMU consists of some sensors, i.e.
accelerometer, gyroscope, and magnetometer. In IMU system,
angle data from gyroscope and accelerometer sensor must be
combined using a complementary filter because each sensor
data still has a noise signal. This paper discusses tracking
object using GPS and IMU sensor and then processed by the
microcontroller to display in Personal Computer (PC). Object
tracking system that designed works well. The result of testing,
the average of error for GPS and IMU system, respectively, are
2.67 m and 0.96
o
.
Keywords— tracking system; GPS; IMU sensor; position and
attitude
I. I
NTRODUCTION
(H
EADING
1)
The increasing of unmanned vehicles or unmanned
objects, such as Unmanned Aerial Vehicle (UAV) and
Unmanned Surveillance Vehicle (USV), required a tracking
system to know the movement of the object[1]. Tracking
system required because the object is controlled remotely
and the movement of an object is too far from an operator.
This tracking system requires object location and attitude.
Object location indicated by latitude and longitude
coordinates where the object is placed, while attitude
indicated by roll, pitch, and yaw angle.
Global Positioning System (GPS) and Inertial
Measurement Unit (IMU) sensor can be used to obtain
information about object location and attitude[2]. IMU
consists of several sensors, such as accelerometer,
gyroscope, and magnetometer sensor[3]. Such of the sensors
provide information about data angle, data from each sensor
must be combined because each sensor data still has a noise
signal. The sensor data must be filtered with complementary
filter, so the result turned to good[4].
This paper discusses about tracking object using GPS and
IMU sensor; that object is static and moving. The obtained
data is processed by microcontroller, then sent to Personal
Computer (PC) using receiver and transmitter antenna of
433MHzfrequency radio. Tracking object is monitored by
PC in real time.
II. M
ETHODOLOGY
A. Block Diagram
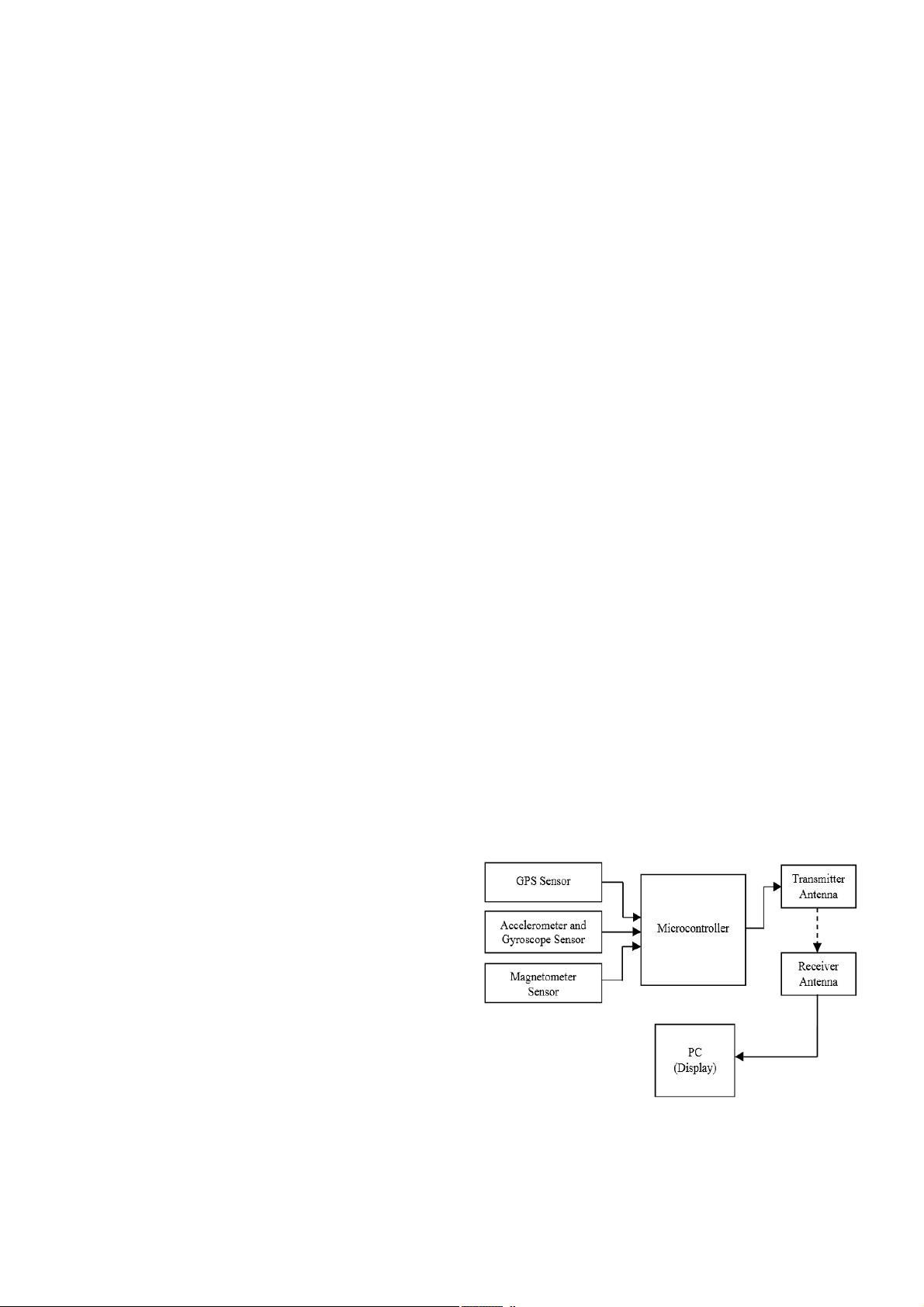
The GPS, accelerometer, gyroscope, and magnetometer
sensor are used as input for the system. Microcontroller is
used to process input data. The output system is PC, receiver
and transmitter antenna of 433MHzfrequency radio. Block
diagram of tracking object is shown in Fig.1.
GPS is giving information about location for the object,
i.e. latitude and longitude coordinate. Accelerometer,
gyroscope, and magnetometer sensor are giving information
about attitude of the object, there are roll, pitch, and yaw
angle. Complementary filter is used to combine the sensor
data, because the sensor data still has a noise signal. The
data inputs of GPS, accelerometer, gyroscope, and
magnetometer are processed on microcontroller. Data inputs
are sent using the transmitter antenna of 433MHzfrequency
radio after processed by microcontroller, then received by
the receiver antenna of 433MHzfrequency radio. Finally, the
data are displayed on PC.
B. Design of Hardware Components
The assembly of hardware components from the tracking
object system is made by following components as shown in
Fig. 2.
Fig. 1. Block diagram of tracking object based on GPS and IMU
sensor
!
"#$$%&$"$''(%)
214
下载后可阅读完整内容,剩余4页未读,立即下载
2019-08-08 上传
2011-04-19 上传
2021-11-19 上传
2021-07-13 上传
2019-08-24 上传
2021-11-01 上传
2022-07-15 上传

AbelZ_01
- 粉丝: 996
- 资源: 5440
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
