ABB IRC5机器人操作与安全指南
需积分: 9 79 浏览量
更新于2024-07-31
收藏 9.85MB PDF 举报
"ABB机器人使用手册提供了详尽的操作指南,涵盖了IRC5控制器与FlexPendant的使用,以及安全操作规范。手册适用于M2004型号,由ABB公司于2006年出版,并强调所有权利归ABB所有。内容包括但不限于产品的安全标准、安全术语解释、紧急情况处理、安全功能的启用与停用,以及在不同操作模式下的安全注意事项。此外,手册还介绍了FlexPendant的使用,这是与IRC5控制器交互的主要界面。"
在深入理解"ABB机器人使用手册"中的知识点之前,我们需要先了解IRC5和FlexPendant的基本概念。IRC5是ABB机器人的控制系统,它负责机器人运动的精确控制和整体系统的管理。FlexPendant是IRC5控制器的用户界面,通过它,操作员可以编程、监控和控制ABB机器人。
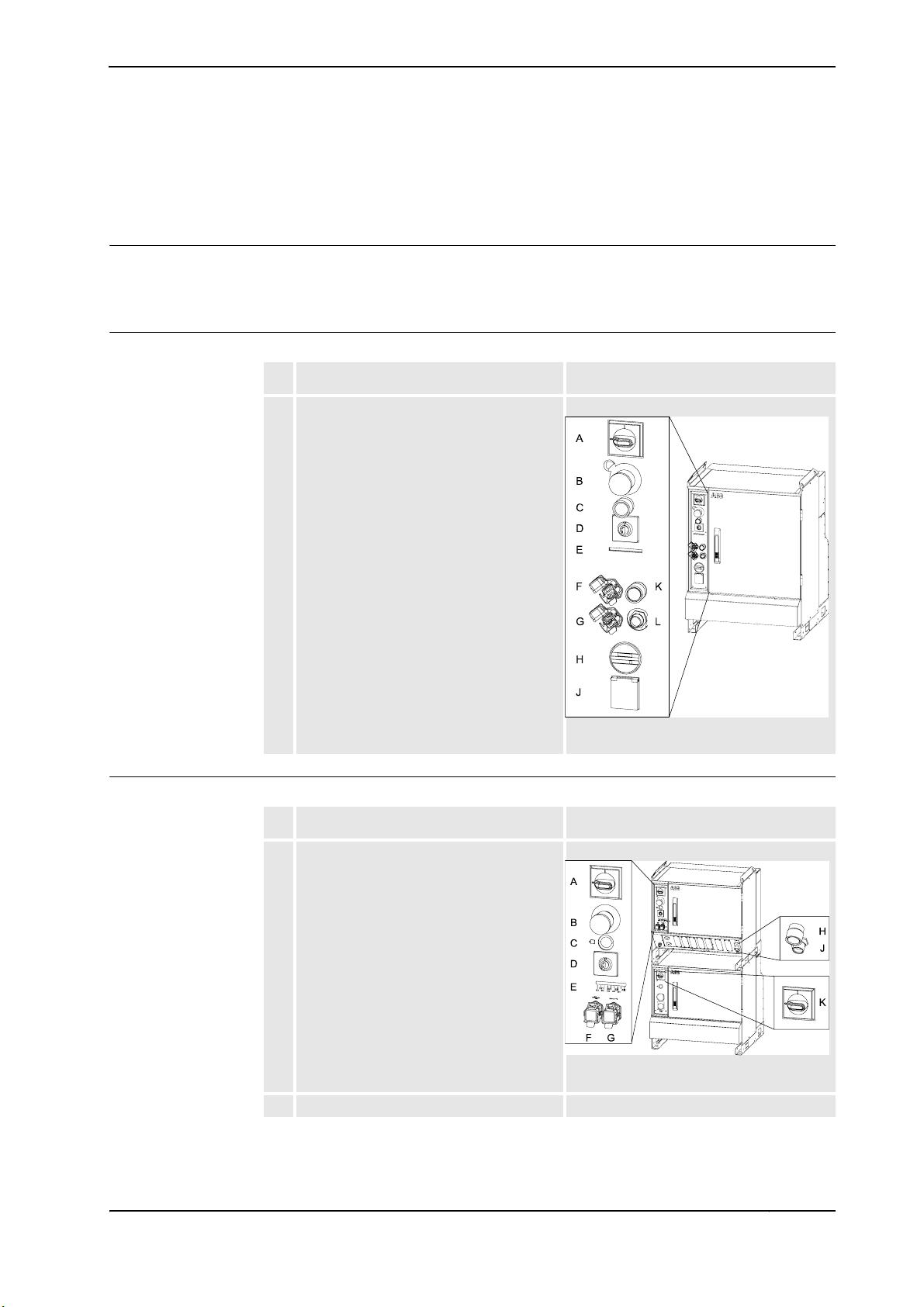
1. IRC5控制器:作为ABB机器人的大脑,IRC5负责接收指令、计算运动轨迹、控制电机并确保机器人精确执行任务。它遵循特定的安全标准,确保在运行过程中对人员和设备的安全保障。
2. FlexPendant:这个手持设备提供了一个直观的界面,用户可以通过触摸屏或物理按键进行操作。它可以用来编写和编辑机器人程序,调整参数,监控机器人状态,以及在发生故障时进行诊断。
安全操作是手册的重点内容,包括以下关键知识点:
1. 安全标准:手册详细解释了IRC5应用的安全标准,确保操作员在使用机器人时遵守国际和行业的安全规定。
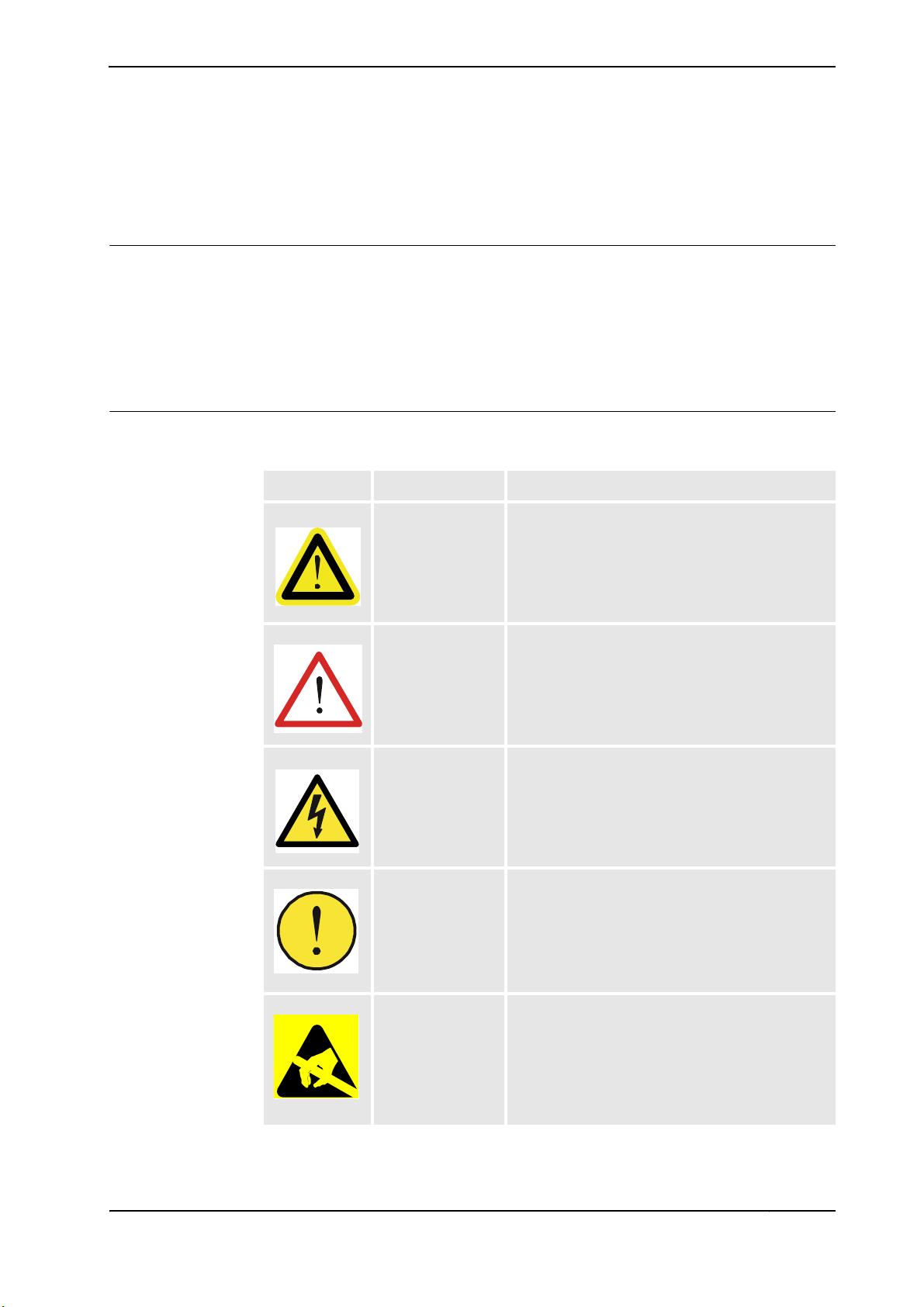
2. 安全术语:手册定义了如"危险"和"警告"等安全标志,提醒操作员在遇到这些标志时应采取的行动,以避免潜在的危险。
3. 紧急情况处理:手册指导操作员如何在紧急情况下迅速停止机器人,释放制动闸,以及在火警等情况下的应对措施。同时,详细阐述了从紧急停止状态恢复到正常操作的步骤。
4. 不同模式下的安全性:手册特别强调了手动减速模式、手动全速模式和自动模式下的安全操作规程,以防止意外伤害和设备损坏。
5. 自身安全与工具:手册提醒操作员在工作中保持警惕,特别是在处理FlexPendant时要注意其静电敏感性,同时推荐使用安全工具来增强操作安全性。
6. 工作流程:手册还介绍了如何从编程路径返回到正常运行,确保在系统设置和调试过程中能够顺畅进行。
"ABB机器人使用手册"是一份全面的指南,旨在帮助操作员安全、高效地操作和维护ABB机器人系统。通过深入学习和实践,用户能够熟练掌握机器人系统的操作技巧,及时识别并解决可能出现的问题。
1 安全
1.2. IRC5 的应用安全标准
3HAC 16590-10 米Ι : H14
© Copyright 2006 ABB. 保留所有权利。
1.2. IRC5 的应用安全标准
健康和安全标准
机器人完全遵循 EEC 机器指令中规定的健康和安全标准。
IRC5 控制的 ABB 机器人符合以下标准:
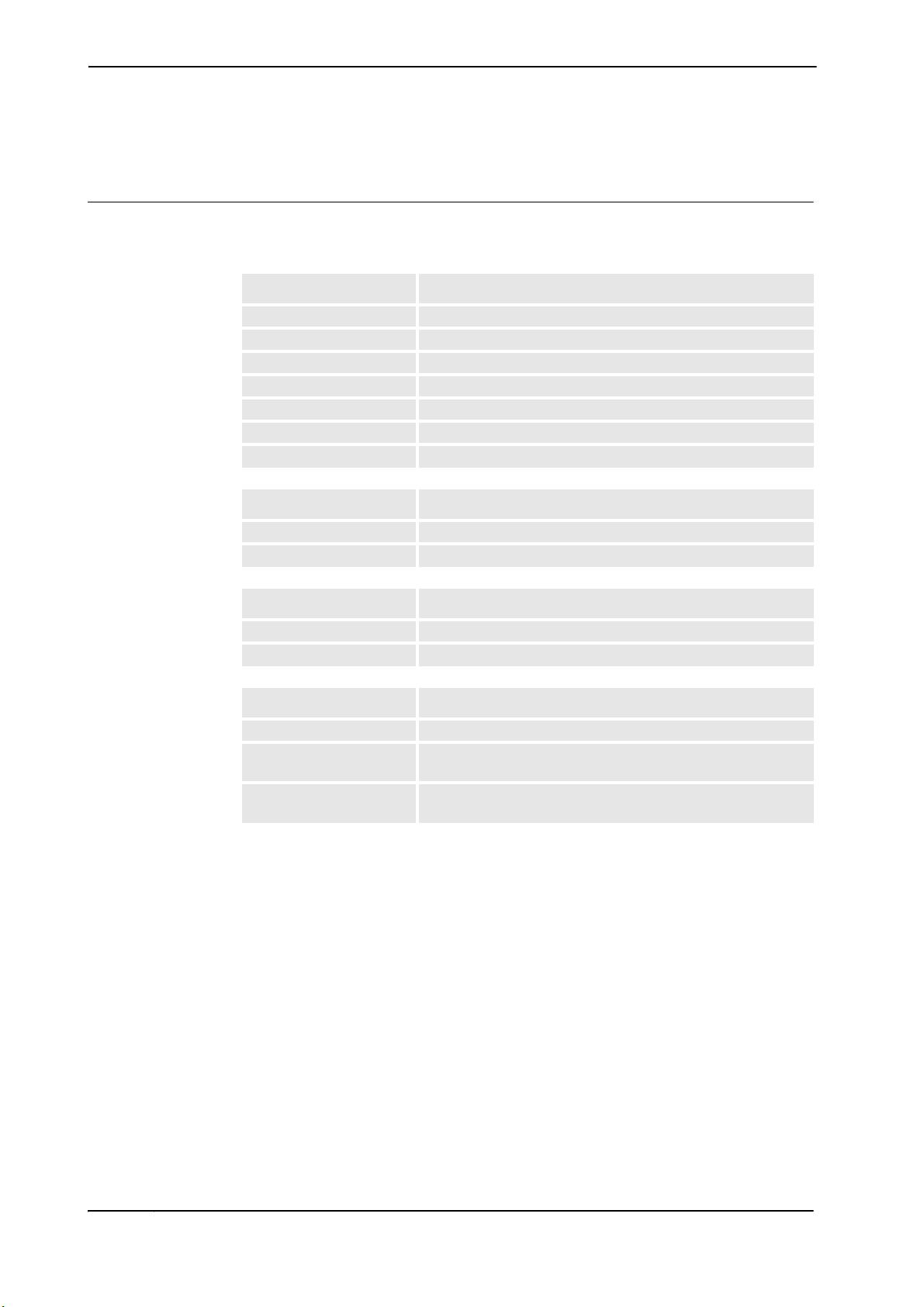
标准 说明
EN ISO 12100-1 机械安全,术语
EN ISO 12100-2 机械安全,技术规范
EN 954-1 机械安全,控制系统的安全相关部件
EN 775 工业操作机器人,安全
EN 60204 工业机器电气设备
EN 61000-6-4 (可选) EMC,通用电磁辐射
EN 61000-6-2 EMC,通用抗电磁辐射
标准 说明
IEC 60204-1 工业机器电气设备
IEC 60529 外壳防护等级
标准 说明
ISO 10218 工业操作机器人,安全
ISO 9787 工业操作机器人,坐标系和动作
标准 说明
ANSI/RIA 15.06/1999 工业机器人和机器人系统的安全要求
ANSI/UL 1740-1998 (可
选)
机器人和机器人设备安全标准
CAN/CSA Z 434-03 (可
选)
工业机器人和机器人系统-通用安全要求
剩余335页未读,继续阅读
2021-06-22 上传
2024-05-11 上传
2021-10-05 上传
2023-05-08 上传
2023-07-03 上传
2023-09-06 上传
2023-11-10 上传
2023-06-26 上传
2023-07-20 上传

q329952344
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







