立体匹配技术详解与应用
"立体匹配是计算机视觉领域中的一个重要技术,主要应用于创建三维场景的深度信息。这份资料由Stefano Mattoccia编撰,详细介绍了立体匹配的算法和应用,涵盖了从基础理论到最新研究进展的全面概述。"
立体匹配是计算机视觉中的一种关键技术,用于从两个或多个不同视角捕获的图像中计算对应像素的深度信息,进而构建三维场景的模型。这项技术在自动驾驶、机器人导航、无人机、增强现实、遥感以及工业检测等多个领域有着广泛的应用。
文档首先会介绍立体匹配的基本概念,包括视差图、基线、对应关系等基本元素。视差图是描述左右图像中对应像素之间差异的图像,而基线是两个摄像头之间的距离,对应关系则指同一场景点在不同图像中的位置关系。
接着,文档可能会深入讨论各种立体匹配算法。例如,传统的基于光流法的算法,这些方法通常通过寻找像素间的相似性来估计视差。随着计算能力的提升,出现了许多快速且准确的算法,如半全局匹配(Semi-Global Matching, SGM)算法,它通过考虑局部邻域的信息来优化匹配过程,降低了错误传播的可能性。
此外,文档可能还会涉及一些特定的应用,例如利用现场可编程门阵列(FPGA)进行实时处理的立体相机系统,以及基于GPU的快速双边滤波立体匹配算法(FBS),这种算法能够有效处理图像边缘的不连续性,提高匹配精度。
文档更新中提到的实验结果,如"Linear stereo matching" (ICCV 2011)、Min et al.'s algorithm (ICCV 2011)以及"FSD"(Fast Segmentation driven)算法,这些都是近年来的研究成果,展示了立体匹配领域的最新进展。这些实验结果提供了对不同算法性能的比较,有助于理解各种方法的优势和局限性。
最后,文档还可能包含对Fast Bilateral Stereo算法的实现细节,这是一种结合了双边滤波的立体匹配方法,能够在保持边缘清晰的同时减少噪声影响。该算法的Linux和Windows版本的实现代码可供下载,方便研究人员和开发者进行实际操作和进一步研究。
总体来说,这份文档为学习和理解立体匹配提供了一个全面的资源,不仅包含了理论介绍,还有实验数据和实际应用,对于想要深入研究该领域的读者来说是非常宝贵的参考资料。
Stefano Mattoccia
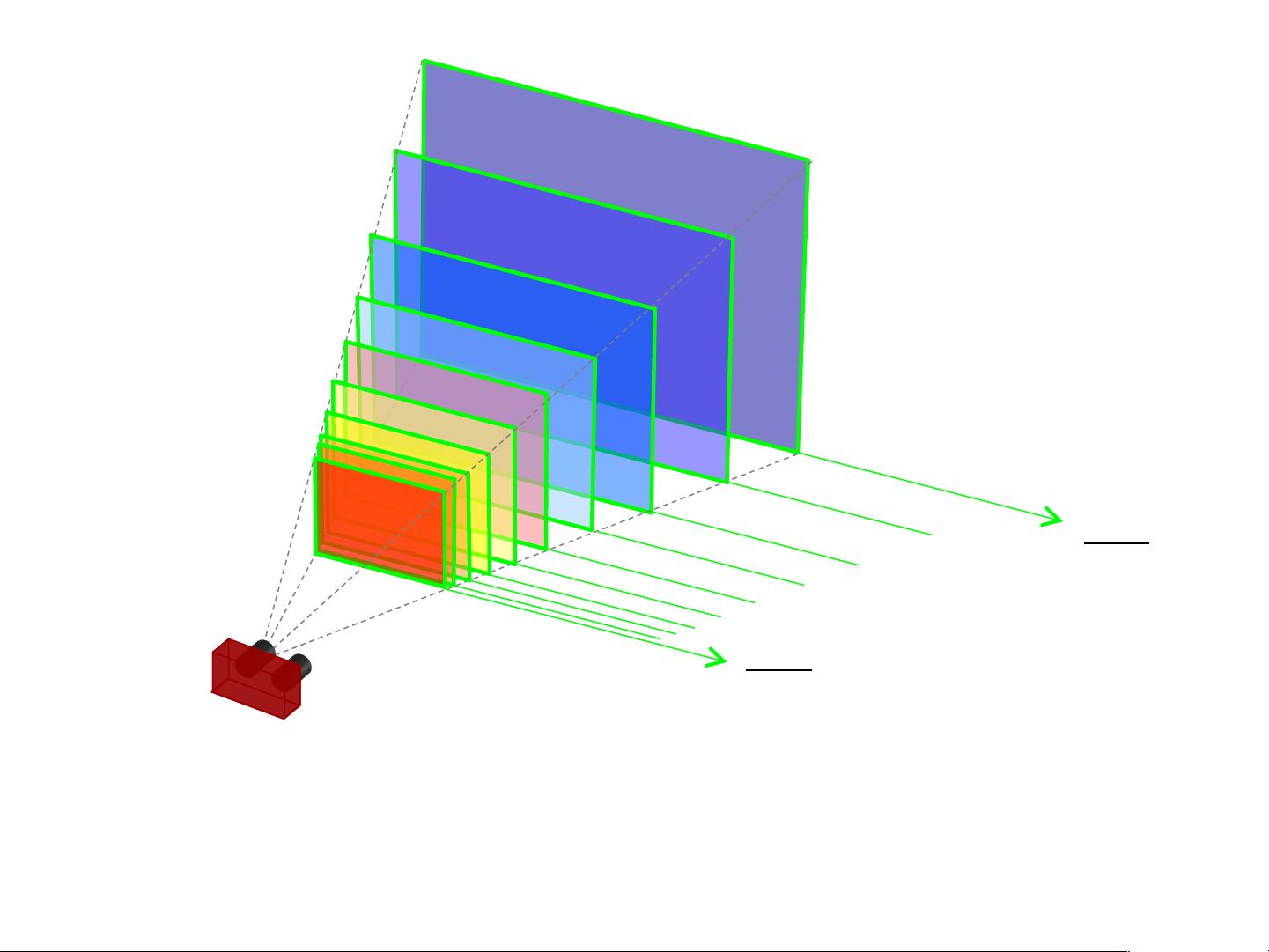
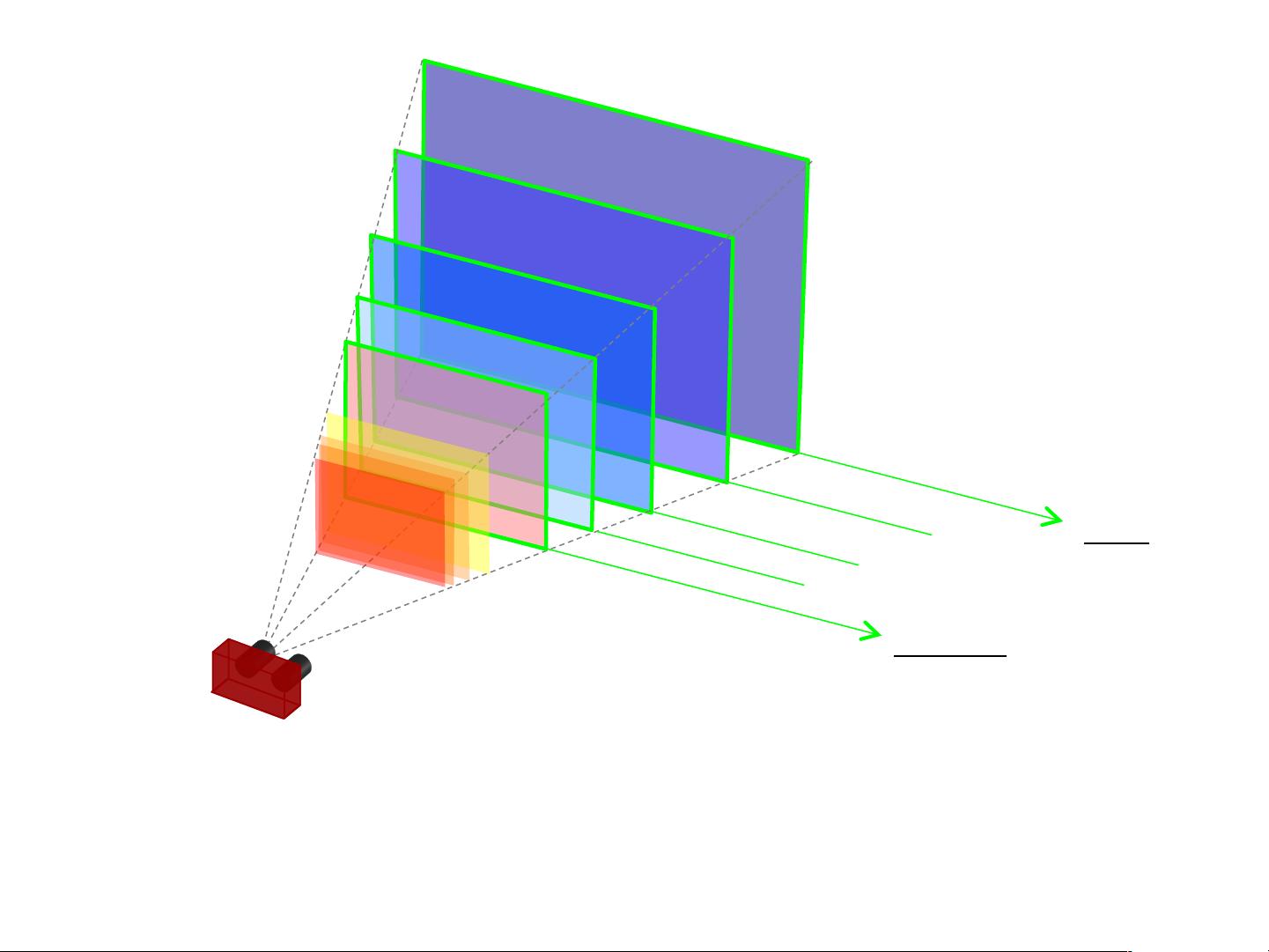
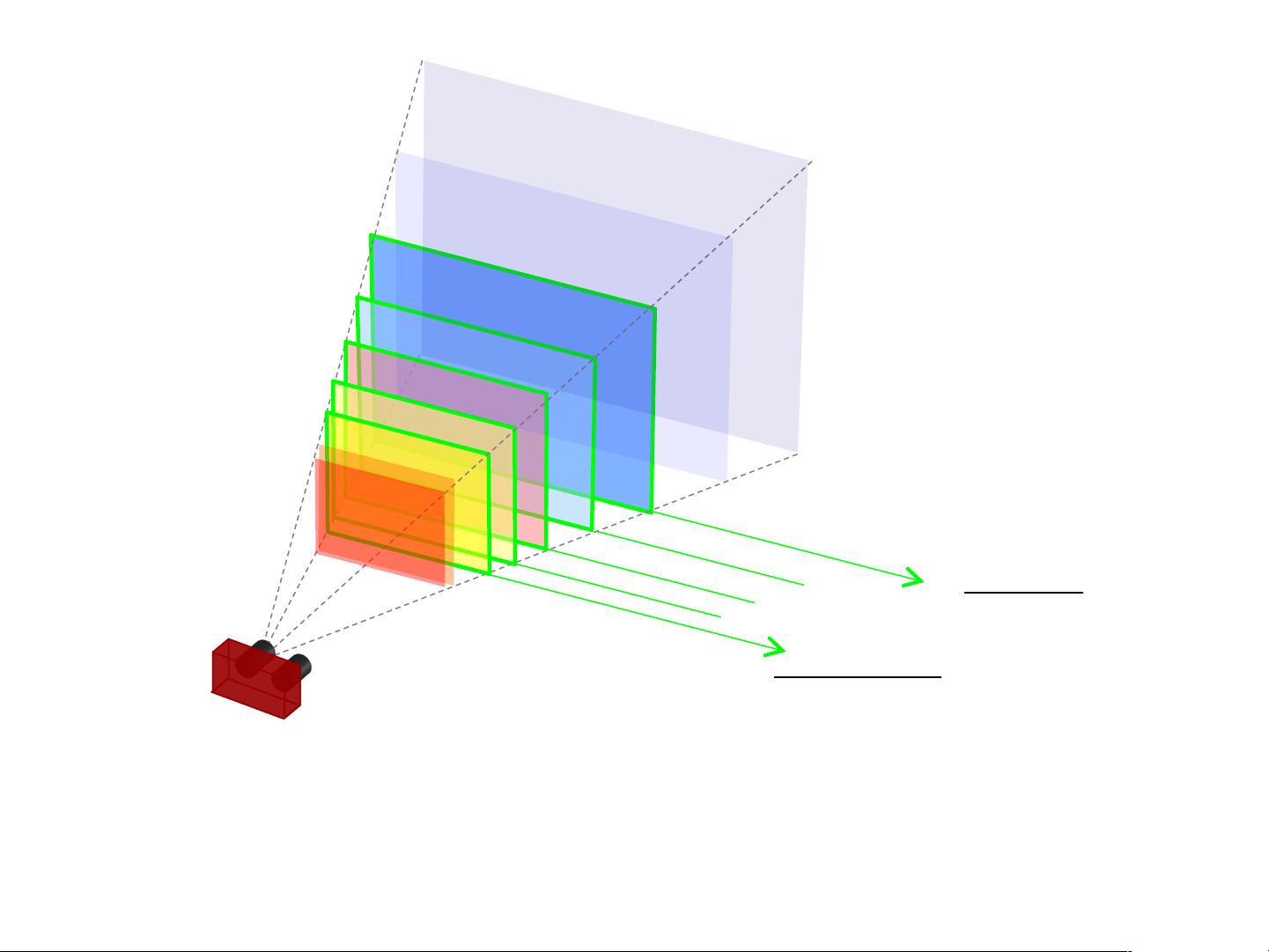
• Depth measured by a stereo vision system is discretized
into parallel planes (one for each disparity value)
• A better (virtual) discretization can be achieved with
subpixel techniques (see Disparity Refinements)
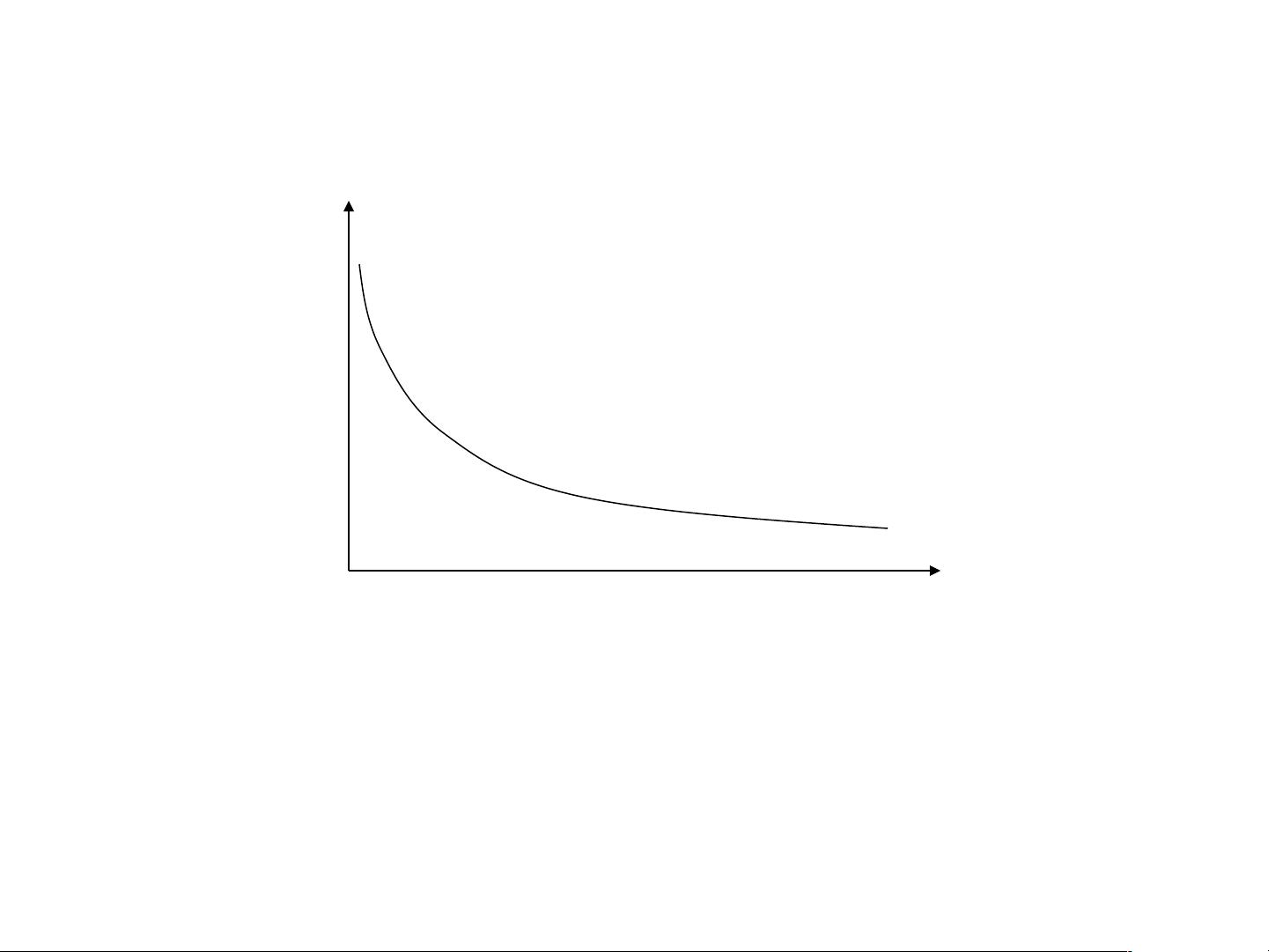
min
d
fb ⋅
max
d
fb ⋅

剩余207页未读,继续阅读
2013-06-08 上传
2016-03-02 上传
点击了解资源详情
2022-07-15 上传
2012-05-15 上传
2022-12-17 上传
2012-08-13 上传
2014-11-27 上传

岳麓吹雪
- 粉丝: 1688
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
