Stanford GPS/GNSS Matlab平台:无缝集成研究
版权申诉
189 浏览量
更新于2024-07-14
收藏 731KB PPT 举报
"Stanford GPS/GNSS Matlab Platform 是一个集成的研究平台,专为GPS和GNSS(全球导航卫星系统)的测量数据处理和研究而设计。该平台允许用户使用不同格式的GPS/GNSS数据,并将其统一转换为Matlab可处理的格式,支持无缝和连续的研究工作。关键特性包括完全基于Matlab的环境、对无限定位数据库的访问以及一个集成了模拟和测量接口的平台。此外,SGMP还包括测量接口、GPS模拟器和用户界面等组件,方便进行位置估计和RAIM(自主完好性监测)等研究。"
Stanford大学的GPS实验室开发的Stanford GPS/GNSS Matlab Platform(SGMP)是一个强大的工具,旨在简化和增强GPS和GNSS领域的研究工作。该平台的核心优势在于它完全基于Matlab,这是GPS/GNSS研究领域广泛采用的编程语言,因此能确保研究过程的连贯性和效率。通过将各种格式如NSTB、NMEA和RINEX的数据转换为Matlab内部的统一格式,用户可以轻松访问和处理几乎无限的定位数据库。
SGMP不仅仅是一个数据转换工具,它还提供了一个集成的平台,这个平台既可以用于GPS的仿真,也可以直接与测量设备接口,这意味着基于SGMP格式的任何模拟研究都能在这个平台上运行。这大大增强了研究的灵活性和兼容性。
在SGMP的组成部分中,测量接口扮演了关键角色,它负责将不同来源的数据转化为平台通用格式。GPSSimulator则支持进行位置估计和RAIM等相关研究,这对于理解和优化GPS系统的性能至关重要。最后,用户界面为研究人员提供了直观的控制,使他们能够更便捷地操作和管理整个研究过程。
通过使用Stanford GPS/GNSS Matlab Platform,研究人员能够高效地处理大量GPS/GNSS数据,进行复杂的仿真和分析,同时还能利用其强大的集成功能,实现跨领域的协同研究。这一工具对于推动GPS技术的进步,特别是在教育、科研和工程应用方面,具有显著的价值。
5
Stanford University - GPS Laboratory
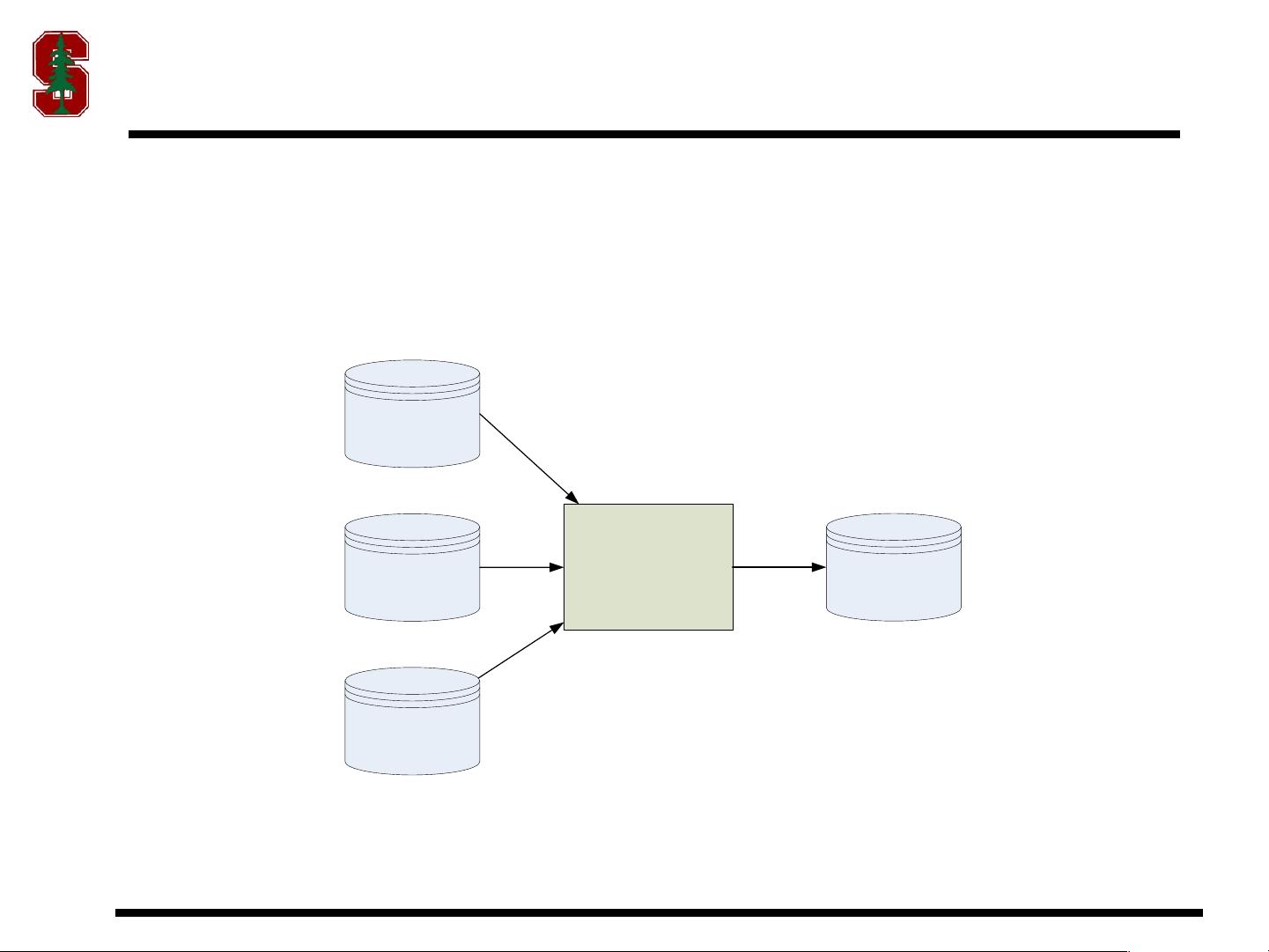
Measurement Interface
An interface to various formats of GPS intermediate
measurements (psuedorange). All supported formats of
measurements are converted to a Matlab format.
Extension to other sensors (TV, WiFi, INS…)?
Measurement
Interface
NSTB
Database
SGMP
Database
RINEX
Database
NMEA
Database
剩余20页未读,继续阅读
120 浏览量
点击了解资源详情
点击了解资源详情
157 浏览量
2022-07-15 上传
160 浏览量
2021-08-09 上传
2022-09-20 上传
146 浏览量

Nico_Robin_
- 粉丝: 0
- 资源: 1866
 我的内容管理
展开
我的内容管理
展开







最新资源
- pg_cron:在PostgreSQL中运行定期作业
- Simple Shooting Game using JavaScript with Free Source Code.zip
- Project SoFi-开源
- LopiPusherBundle:捆绑使用Pusher App
- 西门子WinCC_flexible 电子学习解决方案.rar
- skrubbed.github.io:egs d
- DS-UWB.rar_DS-UWB_宽带信号_超宽带_超宽带信号
- jspm驾校学员管理系统毕业设计程序
- JS6.Booleansen[removed]JS 6。 布尔值JavaScript
- Simple Product Inventory System using
- NuQLeus:通过解析器级别的性能指标和错误跟踪来增强GraphQL端点测试功能
- GNSS_SDR_a.zip_GNSS_GNSS_SDR_a_伪卫星_北斗跟踪
- 高斯白噪声matlab代码-PARCS:使用成对的自适应回归累加器(PARCS)检测多个变化点
- Optimierung-开源
- UCGUI学习资料.rar
- css-essentials-css-issue-bot-9000-den01-seng-ft-062220
