高精度相机位姿估计:基于直线段的直接最小二乘法
194 浏览量
更新于2024-08-27
收藏 2.57MB PDF 举报
本文主要探讨了一种高精度的基于直线段对应的相机位姿(Camera Pose)估计方法,采用直接最小二乘法来解决这一问题。相机位姿估计是机器视觉领域的重要课题,特别是在自动驾驶、机器人导航和三维重建等应用中,精确的位姿信息至关重要。
首先,作者提出了一种创新的距离测度,它综合考虑了直线段之间的端点距离、中点距离、夹角以及线段本身的长度。这种测度能够有效地衡量直线段在空间中的关系,为转换成数学模型提供了坚实的基础。通过将原问题转化为寻找姿态旋转矩阵的最小化问题,该方法将复杂的视觉匹配过程简化为一个二次目标函数的优化。
在旋转矩阵的表示上,作者利用了CGR参数,这是一种常用的参数化形式,可以方便地处理旋转矩阵的运算。通过对CGR参数的调整,形成一个修正后的目标函数。这个修正函数的关键在于其最优解的条件,它们构成了一个三元三次方程组。值得注意的是,与传统的迭代方法不同,本文提出了一种代数多项式方法,可以直接求解这个方程组,从而得到全局最优解,避免了迭代过程中的可能误差累积。
此外,该算法具有较低的计算复杂度,仅为O(n),这意味着随着数据量的增加,算法的执行效率保持相对稳定,这对于实时处理大规模视觉数据具有显著优势。通过仿真和真实实验的验证,这种方法不仅有效,而且能提供高度精确的相机位姿估计结果,证明了其在实际应用中的可行性。
本文提出的基于直线段对应的相机位姿估计直接最小二乘法,通过巧妙的距离测度和多项式求解策略,实现了高效且精确的位姿估计,对于提升机器视觉系统的性能具有重要意义。关键词包括机器视觉、相机位姿估计、直线段对应、多项式方程组和全局最优解,这些概念在全文中紧密相连,共同构成了该方法的核心理论支撑。
光 学 学 报
0615003-
如图 1 所 示 ,世 界坐标 系
O
W
- X
W
Y
W
Z
W
建立 在 模 型 上,且已知 模 型 直线在 世 界 坐标系 下 的 坐 标。
L
为
3D 模型直线段,
P
s
、
P
e
为两个端点坐标。相机坐标系
O
C
- X
C
Y
C
Z
C
则建立在相机上,原点在相机光心,
Z
C
轴
沿光轴指向相机前方,
R, t
为相机坐标系的旋转矩阵和平移向量。由于相机内参已知,则对线段的提取结果
可以认 为是在归一化像面 上,归一化像面 指相机 坐标系
Z
C
= 1
的平面 。
l
为对应 的投影在归一化像 面上的
2D 直线段,
p
s
、
p
e
为两个端点坐标。
π
表示
l
与光心确定的平面,
N
表示该平面法向单位矢量。
在没有噪声的情况下,两组对应端点应该满足共线方程,但是通常直线段提取时,端点沿着直线方向的
定位误差 较大
[15]
,因此实际中使用的是共面方程,即相机光心、图像 2D 直线和 模型 3D 直线三者 在同一平 面
内。可以表示为
N
T
(RP + t) = 0
, (1)
式中
P
为 3D 直线上 的任 意一点 在世界坐标 系下的坐标 。由于 2D 直线 段两个 端点在相机 坐标系下的 坐标
分别为 [ p
T
s
1]
T
、[ p
T
e
1]
T
,则
N =
[ p
T
s
1]
T
× [ p
T
e
1]
T
[ p
T
s
1]
T
× [ p
T
e
1]
T
. (2)
两点确 定一 条直线 ,因此只 需要把 3D 直线 的两个 端点 代入(1)式中即可对 共面性完全 描述。由于 直线
也可以使用直线上的任意一点加直线的方向进行描述,因此共面描述还有其他形式,如关于 3D 直线的方向
的观测方程为
N
T
Rn = 0
, (3)
式中 n = (P
e
- P
s
)
P
e
- P
s
为 3D 直线在世界坐标系下的方向矢量。
2.2 直线段之间距离测度
为了建立直线段测量位姿估计的目标函数,需要定义一种直线段之间的距离测度。
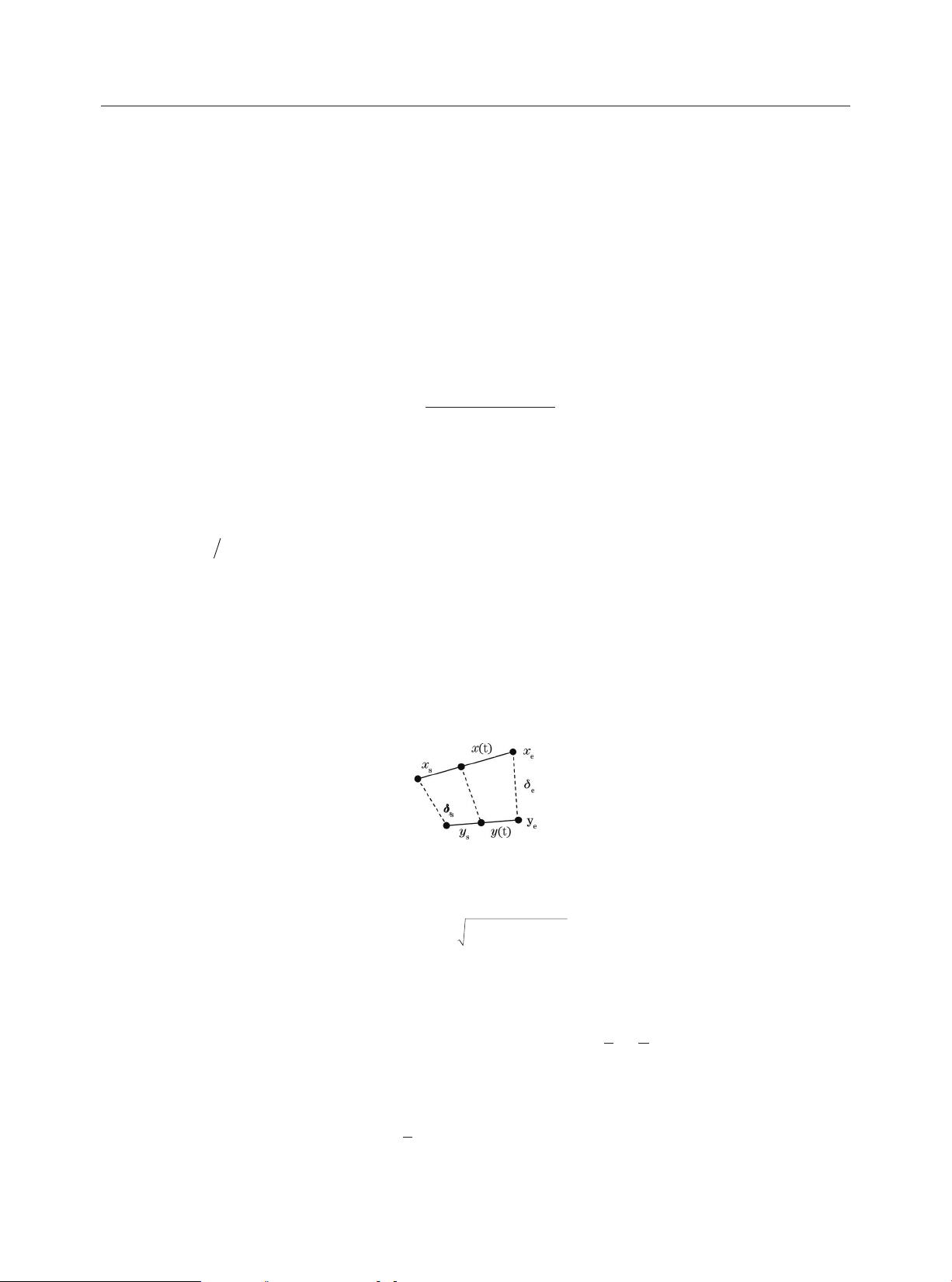
每一条线段存在两个端点,设其是有方向的,也就是定义了一个端点为起点,另一个端点为终点。设线
段
LS
1
表示为
x = (x
s
,x
e
)
,其中
x
s
为起点,
x
e
为终点。线段
LS
2
表示为
y = (y
s
,y
e
)
,其中
y
s
为起点,
y
e
为终点。
则线段
LS
1
、
LS
2
上的参数化的一般点为
x(t) = x
s
+ t(x
e
- x
s
) = tx
e
+ (1 - t)x
s
,t ∈ [0, 1]
, (4)
y(t) = y
s
+ t(y
e
- y
s
) = ty
e
+ (1 - t)y
s
,t ∈ [0, 1]
, (5)
图 2 两条直线段上的对应点
Fig.2 Point correspondence between two straight line segments
则两个有向直线段之间的距离定义为
d(LS
1
,LS
2
) =
∫
0
1
y(t) - x(t)
2
dt . (6)
假设两 条有向 线段内部的点存在对应关 系,并且是 按照其距离两个端 点的长 度比例 对应的,也就是 说
x(t)
与
y(t)
对应,若
t = 0
,则表示起点对应起点,若
t = 1
,则终点对应终点,然后取对应点欧式距离平方的平均
值的 2 次根。将(4)式和(5)式代入(6)式,得到
d
2
(LS
1
,LS
2
) =
∫
0
1
(y(t) - x(t))
2
dt =
∫
0
1
(at
2
+ bt + c)dt =
1
3
a +
1
2
b + c , (7)
式中 a =
[ ]
y
e
- x
e
- (y
s
- x
s
)
2
,
b = 2
[ ]
y
e
- x
e
- (y
s
- x
s
)
T
(y
s
- x
s
), c =
(y
s
- x
s
)
2
。
若设
δ
s
= y
s
- x
s
, δ
e
= y
e
- x
e
,
δ = [δ
T
s
δ
T
e
]
T
,
则容易推导出
d
2
(LS
1
,LS
2
) =
1
3
(
δ
s
2
+ δ
T
s
δ
e
+
δ
e
2
) = δ
T
Bδ =
Aδ
2
, (8)
3
剩余10页未读,继续阅读
4459 浏览量
4190 浏览量
4040 浏览量
160 浏览量
209 浏览量
102 浏览量
2025-01-07 上传
2025-01-07 上传
2025-01-07 上传

weixin_38691199
- 粉丝: 1
- 资源: 940
 我的内容管理
展开
我的内容管理
展开







最新资源
- 导入和读取 Excel 文件:使用 ActiveX 将 Excel 数据导入工作区的自定义且灵活的功能。-matlab开发
- bguerel:本努尔·古雷尔
- cachlamhay
- devopstools.guthub.io
- makehuman-0.8_beta_src.tar.gz
- 新浪微博小助手 龙网新浪微博小助手 v9.7
- intro-to-java-workshop-Jayh80961:GitHub教室创建的java-workshop-Jayh80961简介
- 行业分类-设备装置-一种承坐式万向运动平台.zip
- tensorscript:移至https
- CV
- 协程:学校Opdracht
- 基于神经网络的图像分类和bp算法 matlab实现 图像分类.zip
- bw-ssh-docs:Bitwarden SSH管理器文档
- 行业分类-设备装置-一种接地电容的RC常数测量方法.zip
- lin_interp(T, var_name, TBDx):内插表值-matlab开发
- 强制粘帖0.2.zip
