"基于单片机的WIFI智能小车设计及企业实践报告"
122 浏览量
更新于2023-12-31
收藏 3.62MB DOC 举报
本文主要介绍了一个基于单片机的WIFI智能小车设计。文章首先介绍了实践报告的背景和目的,并列出了该报告的目录。
第一章 绪论部分主要介绍了实践报告的背景和意义。随着科技的不断发展,人们对智能设备的需求也越来越高。智能小车作为智能设备的一种形式,在很多领域都有着广泛的应用。为了满足人们对智能小车的需求,本实践项目将基于51单片机设计一款具有WIFI遥控功能的智能小车。
第二章 方案论证及选择部分介绍了系统方案以及总体设计方案的选择。在系统方案选择方面,作者考虑了多种方案并进行了比较分析,最终选择了基于51单片机的设计方案。在总体设计方案部分,作者详细阐述了小车的整体结构和设计思路,并提出了具体的设计要求和功能需求。
第三章 系统硬件设计部分详细介绍了系统的硬件设计过程。该部分主要包括了电路原理图的设计、元器件的选择以及电路板制作等内容。作者在设计过程中充分考虑了系统的可靠性和稳定性,并且在选择元器件时也充分考虑了成本和性能之间的平衡。
第四章 系统软件设计部分主要介绍了系统的软件设计过程。作者首先介绍了51单片机的基本原理和程序结构,并详细阐述了小车的各个功能模块的软件设计过程。在设计过程中,作者注重代码的简洁性和可读性,并采取了一些优化措施来提高系统的性能。
第五章 系统调试与测试部分介绍了系统的调试和测试过程。作者详细描述了对系统各个功能模块进行测试的方法和步骤,并列出了测试结果和分析。通过调试和测试,作者发现系统各个功能都能正常工作,达到了设计要求。
第六章 总结与展望部分对整个项目进行了总结,并对未来的工作进行了展望。作者认为该系统在设计和实现过程中取得了一定的成果,但仍存在一些问题和不足之处。未来可以进一步完善系统的功能,提高系统的性能和稳定性。
综上所述,本文详细介绍了基于单片机的WIFI智能小车的设计过程,包括系统方案选择、硬件设计、软件设计、调试与测试等。通过本次实践项目,作者在设计和实现方面积累了宝贵的经验,并为未来的研究和开发工作提供了一定的参考。

5
第 3 章 硬件系统设计
3.1 路由器
路由器(Router),(如图 3-1 所示)是连接因特网中各局域网、广域网的设
备,它会根据信道的情况自动选择和设定路由,以最佳路径,按前后顺序发送信
号。 路由器是互联网络的枢纽"交通警察"。目前路由器已经广泛应用于各行各
业,各种不同档次的产品已成为实现各种骨干网内部连接、骨干网间互联和骨干
网与互联网互联互通业务的主力军。路由和交换机之间的主要区别就是交换机发
生在 OSI 参考模型第二层(数据链路层),而路由发生在第三层,即网络层。这
一区别决定了路由和交换机在移动信息的过程中需使用不同的控制信息,所以说
两者实现各自功能的方式是不同的。
路由器(Router),(如图 3-1 所示)又称网关设备(Gateway)是用于连接
多个逻辑上分开的网络,所谓逻辑网络是代表一个单独的网络或者一个子网。当
数据从一个子网传输到另一个子网时,可通过路由器的路由功能来完成。因此,
路由器具有判断网络地址和选择 IP 路径的功能,它能在多网络互联环境中,建
立灵活的连接,可用完全不同的数据分组和介质访问方法连接各种子网,路由器
只接受源站或其他路由器的信息,属网络层的一种互联设备。
下图是路由器的设备图,如图 3-1 所示。
图 3-1 路由器
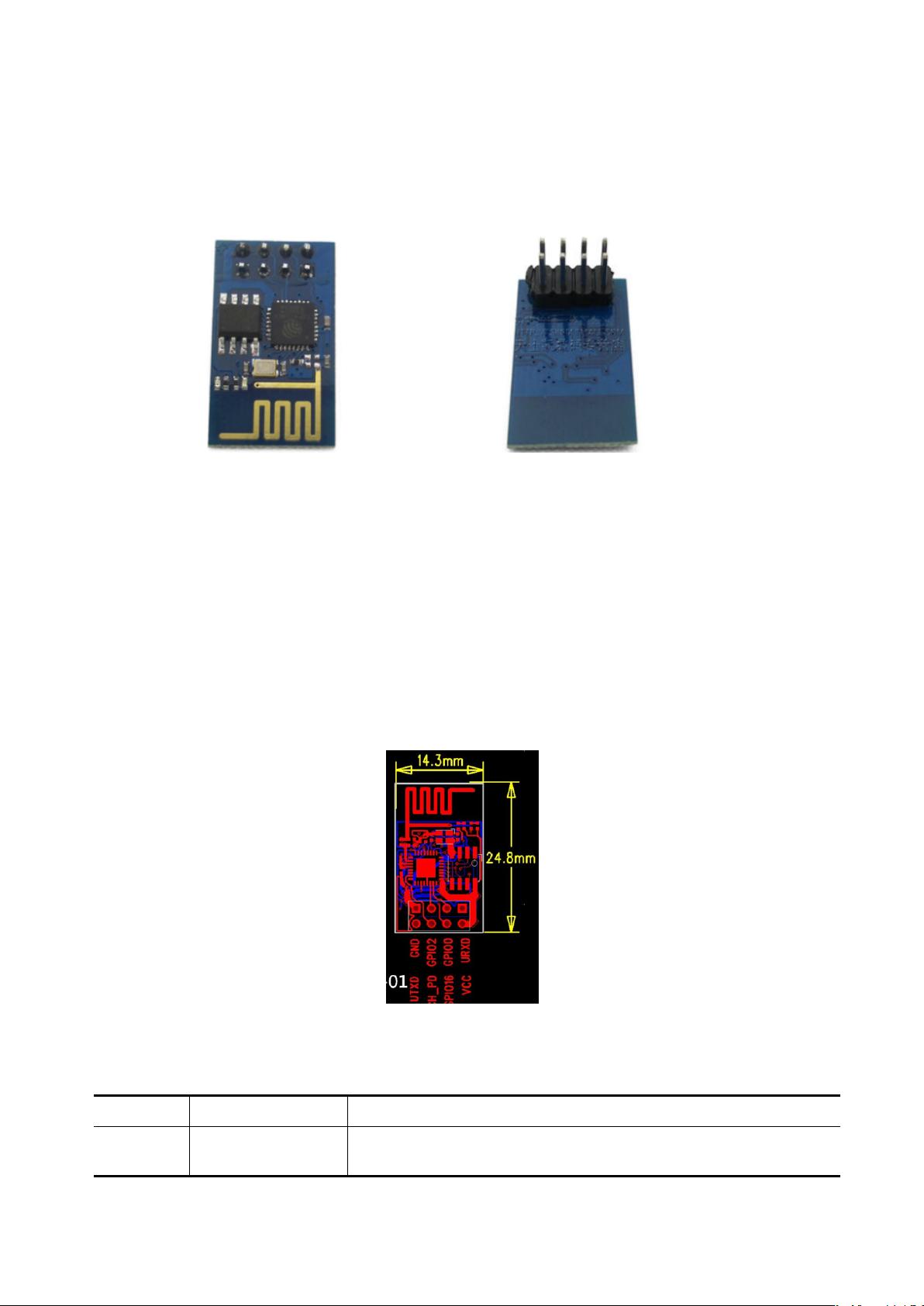
3.2 ESP8266WIFI 模块
本次设计用到 ESP8266WIFI 模块是用于连接到路由器,然后接收手机端发送
的信号,对单片机进行控制。
WIFI 模块又名串口 WIFI 模块,属于物联网传输层,功能是将串口或 TTL 电
平 转 为 符 合 WIFI 无 线 网 络 通 信 标 准 的 嵌 入 式 模 块 , 内 置 无 线 网 络 协 议
剩余36页未读,继续阅读
2023-02-27 上传
2021-09-27 上传
2023-06-30 上传
2021-09-28 上传
2022-07-16 上传
129 浏览量

zzzzl333
- 粉丝: 791
- 资源: 7万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
