机器人DH坐标系建立与运动学解析
"本资源详细介绍了机器人DH坐标系的建立方法,涵盖了不同情况下的建系技巧,包括平移和旋转的组合。主要内容涉及正逆运动学的求解基础,坐标变换,以及各种关节类型和杆件构形。"
在机械臂的运动学中,DH坐标系(Denavit-Hartenberg Parameters)是一种广泛使用的表示方法,用于描述机器人各关节和杆件之间的几何关系。DH坐标系的建立旨在明确机器人各个部件在空间中的相对位置,从而能够通过关节角的计算得出末端执行器的位置(正运动学),或者反过来,根据末端执行器的目标位置推算出所需的关节角(逆运动学)。
正运动学是将关节变量转换为末端执行器在空间的位置和姿态,而逆运动学则是解决相反的问题,即给定末端执行器的期望位置和方向,求解各关节应具有的角度。DH坐标系通过一系列的坐标变换矩阵实现这些计算。
在建立DH坐标系时,需要考虑以下关键步骤:
1. 确定相邻杆件的相对坐标系:每个杆件相对于前一个关节的坐标系有一个新的Z轴(Zn-1)和X轴(Xn-1),其中Z轴通常定义为旋转轴,X轴垂直于两连杆的公共垂线。
2. 参数确定:包括连杆长度ln(从Zn-1到Zn沿Xn-1的距离)、两关节轴之间的扭角αn(Zn-1到Zn绕Xn的旋转角)、偏置距离dn(Xn-1到Xn沿Zn-1的垂直距离)以及两连杆间的角度θn(Xn-1到Xn绕Zn-1的旋转角)。
3. 右手定则的应用:用于确定Y轴的方向,确保坐标系符合右手坐标系统的规则。
在实际的机器人结构中,关节可以分为转动关节和移动关节。转动关节提供一个旋转自由度,如铰链,而移动关节提供一个平移自由度。每个关节都连接着两个杆件,确保了机器人结构的稳定性和运动传递。对于多关节机器人,特别是工业机器人,通常会有多个这样的关节和杆件组合,以实现复杂的空间运动。
本资源详细阐述了两种常见的杆件构形:
1. 两个平行的转动关节,无扭转:在这种情况下,连杆的长度ln是重要的参数,且关节间的夹角θn是可变的,可以绕Zn-1轴旋转。
2. 两个形成90°扭转的转动关节:这种情况涉及到一个空间旋转,连杆长度ln同样重要,且关节间的相对扭转和角度变化需要特殊考虑。
通过理解DH坐标系的建立方法和参数,可以有效地进行机器人运动学分析,这对于机器人控制系统的设计和路径规划至关重要。
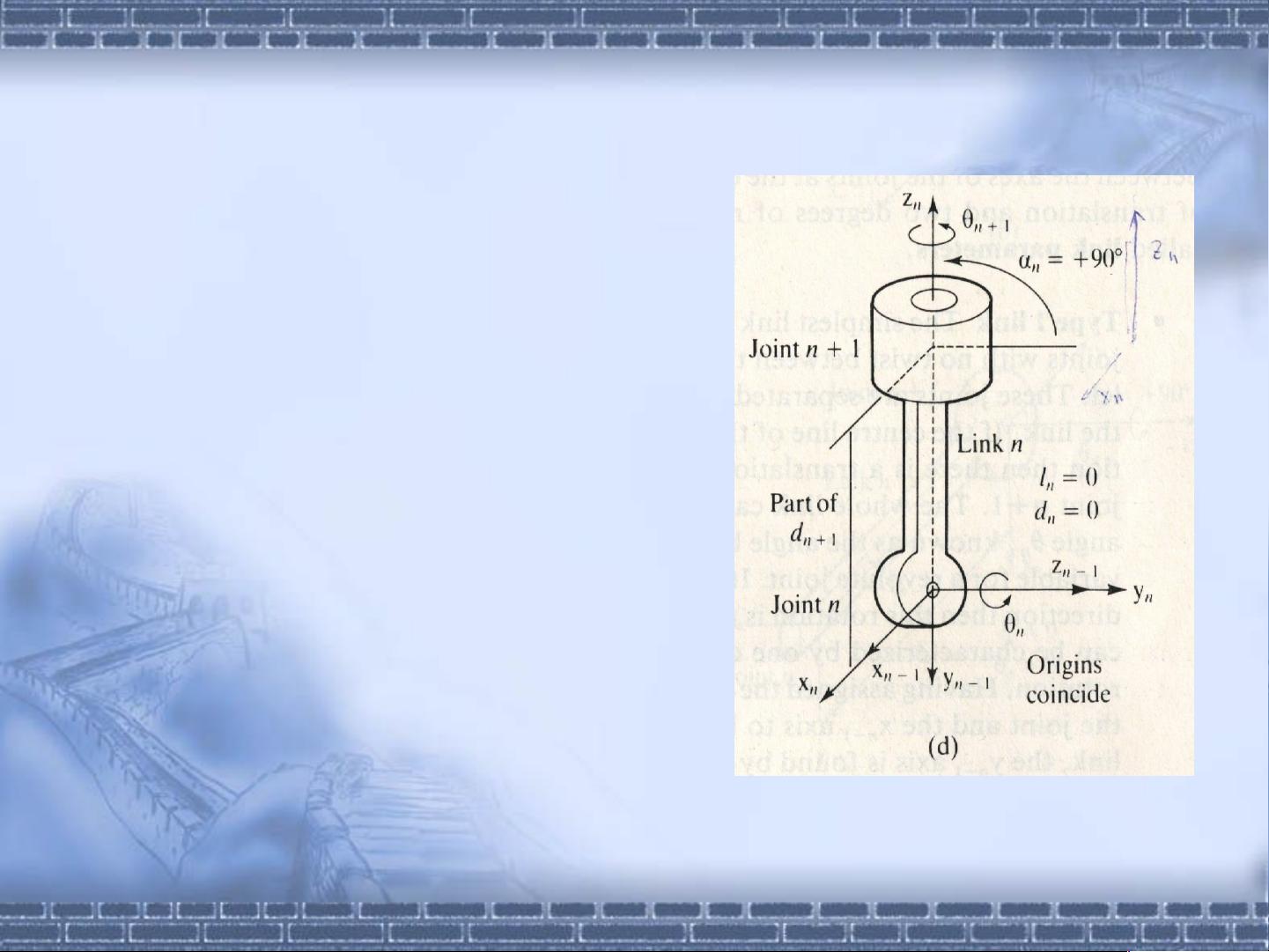
4) 两个转动关节相互垂
直并且重合;连杆参数 l
n
=0 ;
关节轴被认为是 z 方向; x
方向由两个 z 轴确定, y 方
向由右手定则; d
n
为偏移值。
原点由 n-1 坐标系决定
剩余54页未读,继续阅读
1060 浏览量
2021-12-18 上传
点击了解资源详情
153 浏览量
186 浏览量
832 浏览量

今天有雨请带伞
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- imgix-emacs: Emacs内图像编辑与imgix URL生成工具
- Python实现多功能聊天室:单聊群聊与智能回复
- 五参数逻辑回归与数据点拟合技巧
- 微策略MSTR安装与使用教程详解
- BootcampX技术训练营
- SMT转DIP分线板设计与面包板原型制作指南
- YYBenchmarkFFT:iOS/OSX FFT基准测试工具发布
- PythonDjango与NextJS构建的个人博客网站指南
- STM32控制433MHz SX1262TR4-GC无线模块完整设计资料
- 易语言实现仿SUI开关滑动效果源码教程
- 易语言寻路算法源码深度解析
- Sanity-typed-queries:打造健壮的零依赖类型化查询解决方案
- CSSSTATS可视化入门套件使用指南
- DL_NG_1.4数据集压缩包解析与使用指南
- 刷卡程序及makefile编写教程
- Unreal Engine 4完整视频教学教程中文版208集
