足式机器人平衡算法与智能探索
需积分: 0 27 浏览量
更新于2024-07-01
4
收藏 7.13MB PDF 举报
"这篇文档是关于足式机器人平衡算法的研究,涵盖了动力学、平衡性和机动性的提升,以及主动平衡的历史,特别关注了奔跑机器人的控制策略。文档指出,行走控制通常被分解为三个部分,并在三维空间中进行操作。"
在机器人学领域,足式机器人的研究具有重要的理论和实践价值。它们模拟了生物体的行走机制,尤其是通过腿部的复杂运动来保持稳定和移动。标题提到的"Legged Robots that Balance"聚焦于这一主题,阐述了如何设计和控制足式机器人以实现稳定的行走和奔跑。
描述中提到的动力学和平衡性是足式机器人设计的关键要素。动力学涉及机器人运动的物理规律,包括力、速度和加速度等。平衡性则关乎机器人如何在各种环境下保持稳定,尤其是在不平坦的地形或动态的环境中。通过优化动力学模型和控制算法,可以显著提高机器人的机动性,使其在复杂环境中具备更好的适应性和功能性。
主动平衡研究史部分可能涵盖了早期的控制策略发展,如基于模型预测控制(Model Predictive Control)和基于逆动力学的控制方法,这些都是为了使机器人能够在行走过程中主动调整姿态,防止摔倒。奔跑机器人则需要更高级的控制策略,因为它们不仅需要保持平衡,还要克服更大的惯性和速度变化。
文中提到的行走控制被分解为三个部分,这通常是指步态规划、姿态控制和地面接触阶段的管理。步态规划涉及到机器人行走周期的序列和节奏;姿态控制关注机器人身体的三维位置和方向;地面接触阶段管理则涉及机器人足部与地面交互的细节,如触地和离地的时机及力量分布。
三维空间中的控制意味着机器人需要处理不仅仅是前后左右的移动,还包括上下方向的平衡,这增加了控制的复杂性。解决这个问题通常需要集成传感器,如惯性测量单元(IMU)、力矩传感器和视觉传感器,以获取实时的环境和自身状态信息。
这份文档深入探讨了足式机器人平衡算法的技术挑战和解决方案,对于理解机器人学、控制理论和人工智能在实际应用中的结合具有重要参考价值。通过不断的研究和技术创新,足式机器人有望在未来实现更高级别的自主行走和运动能力,拓宽其在救援、探索和制造等领域的应用。
8
Ooka 等人。1985 年)。
主动平衡研究史
上一节主要介绍了静平衡足式机器人。本章将探究主动平衡的动态机器人。
第一台主动平衡的机器是一台自动控制的倒立摆。众所周知,人可以很轻松地用
手指平衡指尖上立着的扫帚。为什么不使用自动控制来制造一个能自我平衡的扫
帚呢?
克劳德·香农可能是第一个这么做的人。1951 年,他用一些零件制造了一台
机器,在一辆小型动力卡车上平衡倒立摆(香农 1985)。卡车来回行驶,以响应
钟摆的倾斜运动,钟摆底部有一对感应开关用于检测钟摆的倾斜。为了让卡车从
一个地方移动到另一个地方,卡车首先必须远离目标点,使钟摆失去平衡。为了
在目标点让钟摆再次保持平衡,卡车会从远离目标点的地方减速,直到钟摆再次
竖直,同时速度为 0,保证钟摆回到中点。
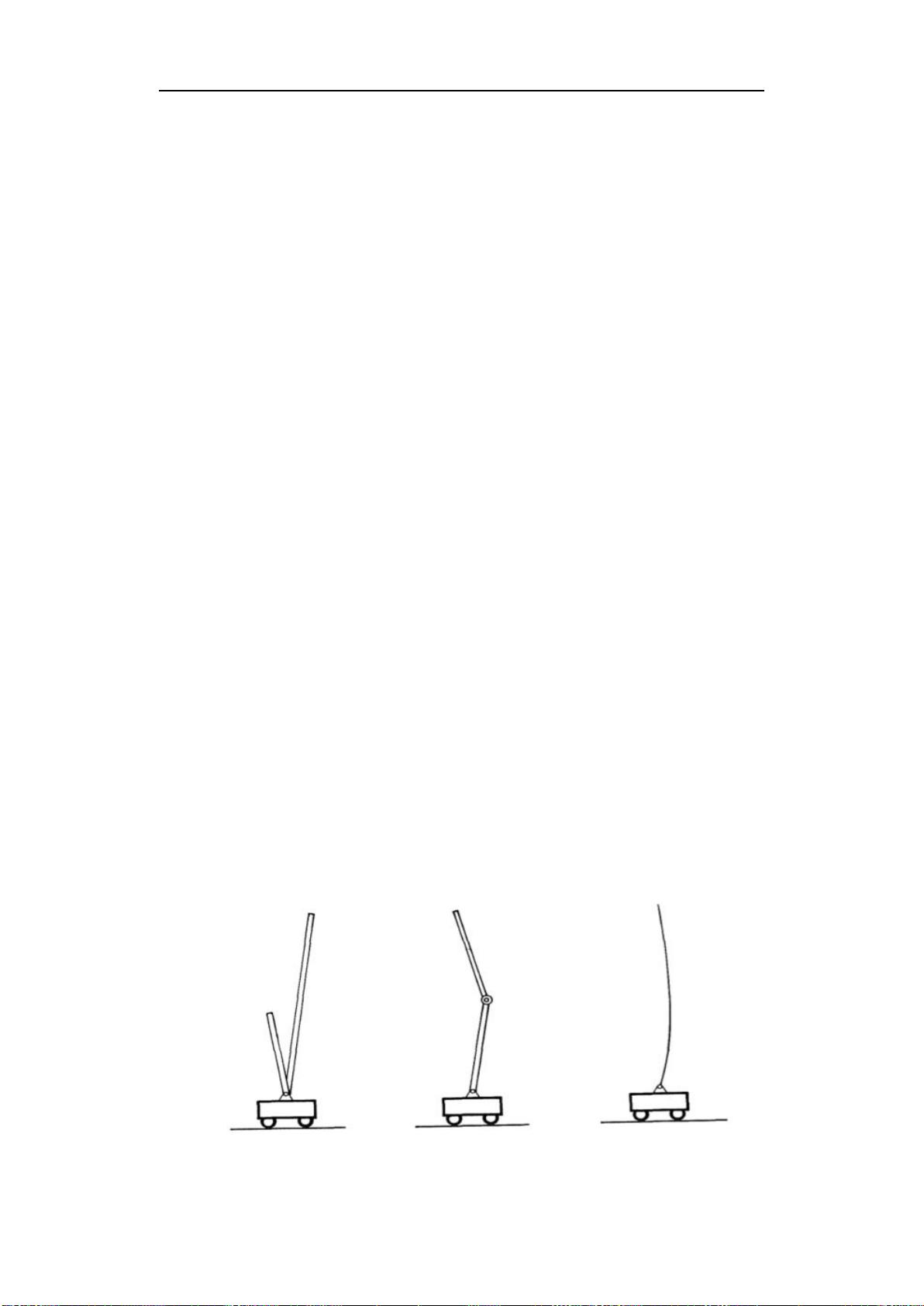
正是在香农的敦促下,坎农和他在斯坦福大学的两名学生开始研究二阶倒立
摆的控制器。二阶倒立摆分为两种:一种是钟摆是并排装在小车上的,另一种是
钟摆串联装在小车上(图 1.6)。 坎农的团队对单输入多输出问题和可实现平衡
的局限性做了很多研究:如何使用单一驱动力来控制两个钟摆的角度以及小车的
位置?考虑到机械系统的参数,如车上电机强度或摆的长度,系统在不可能恢复
平衡之前最大偏离平衡的程度是多少?
利用基于法向坐标和 bang-bang 开关曲线的分析,将系统的能控区域表示为
系统物理参数的显式函数。一旦构建了这些能控区域,它们的边界就可以用来寻
找提供控制的开关函数。后来,他们扩展了这些技术,以提供一个灵活的倒立摆
的平衡。这些对倒立摆平衡的研究是以后运动研究的重要基础。倒立摆步行模型
将成为研究腿部系统平衡的主要工具。然而,还没有人将坎农优雅的分析结果推
广到更复杂的腿足式机器人。
图 1.6 坎农和他的学生制造了三种能在移动的车上平衡倒立摆的机器:两个倒立摆并排平

剩余161页未读,继续阅读
2018-01-17 上传
2022-08-08 上传
2022-08-03 上传
2019-08-21 上传
2023-07-04 上传

被要求改名字
- 粉丝: 37
- 资源: 315
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
