全桥峰值电流控制:LAT1319的Push-Pull模式与跟随策略
需积分: 5 149 浏览量
更新于2024-08-03
收藏 493KB PDF 举报
在全桥变换器的设计中,峰值电流控制是一种常见的策略,尤其对于抑制磁偏至关重要。客户的需求是确保滞后臂(Q2/Q3)的PWM驱动脉宽能够精确地跟随超前臂(Q1/Q4)的脉宽变化,而这在传统的峰值电流控制中遇到了挑战。因为超前臂的关断是由桥臂电流达到预设峰值电流值触发的,这个事件是不确定的,使得直接通过更新比较寄存器调整脉宽的方法不再适用。
为了解决这个问题,本文介绍了一种利用高精度定时器LAT1319的Push-Pull模式来实现全桥峰值电流控制。Push-Pull模式通过设置定时器的输出通道CH1和CH2,使其在相同的set/reset事件下交替输出,并保持脉宽同步。然而,传统的Push-Pull模式在外部事件(如峰值电流比较)不可预知的情况下,可能会失去脉宽一致性。
LAT1319的特色在于其Balanced idle + auto-re-enabled工作模式,这个特性在遇到外部事件导致PWM输出关闭后,会自动将当前脉宽复制到另一个通道,并在下一个周期继续输出,确保滞后臂能紧跟超前臂的脉宽。此外,Balanced idle模式还支持自动使能功能,即使在外部事件消失时,PWM输出也能在下一周期自动恢复,而无需人工干预。
实施此方案的关键步骤包括:首先,根据客户的具体要求设定全桥变换器的驱动波形,保证在没有峰值电流比较事件时,两臂的脉宽相同;其次,利用高精度定时器的Push-Pull模式配置定时器输出,确保在峰值电流事件后,滞后臂能正确地复制超前臂的脉宽;最后,启用Balanced idle + auto-re-enabled功能,以确保即使在外部事件触发的关断后,也能维持PWM信号的准确同步。
通过结合全桥变换器的拓扑结构、峰值电流控制原理和高精度定时器的Push-Pull模式,可以有效地解决滞后臂PWM脉宽跟随问题,从而实现对全桥变换器性能的精确控制。这对于高性能、稳定工作的电力电子设备来说是一项重要的技术优化。
LAT1319
Local Application Tips
LAT1319 – Rev 1.0 – Oct. 2023
Push-Pull 模式在全桥峰值电流控制中的应用
关键字:Push-Pull,峰值电流控制
1. 前言
客户在全桥变换器的应用中需要采用峰值电流控制方式,为了防止磁偏,要求滞后臂的 PWM
驱动脉宽严格跟随超前臂的 PWM 驱动脉宽。但在峰值电流控制中,超前臂 PWM 的关断是由峰
值电流比较事件决定(即桥臂电流达到给定电流),是不可预知的,所以常规的通过更新比较寄存器
修改脉宽的方式无法实现该功能。
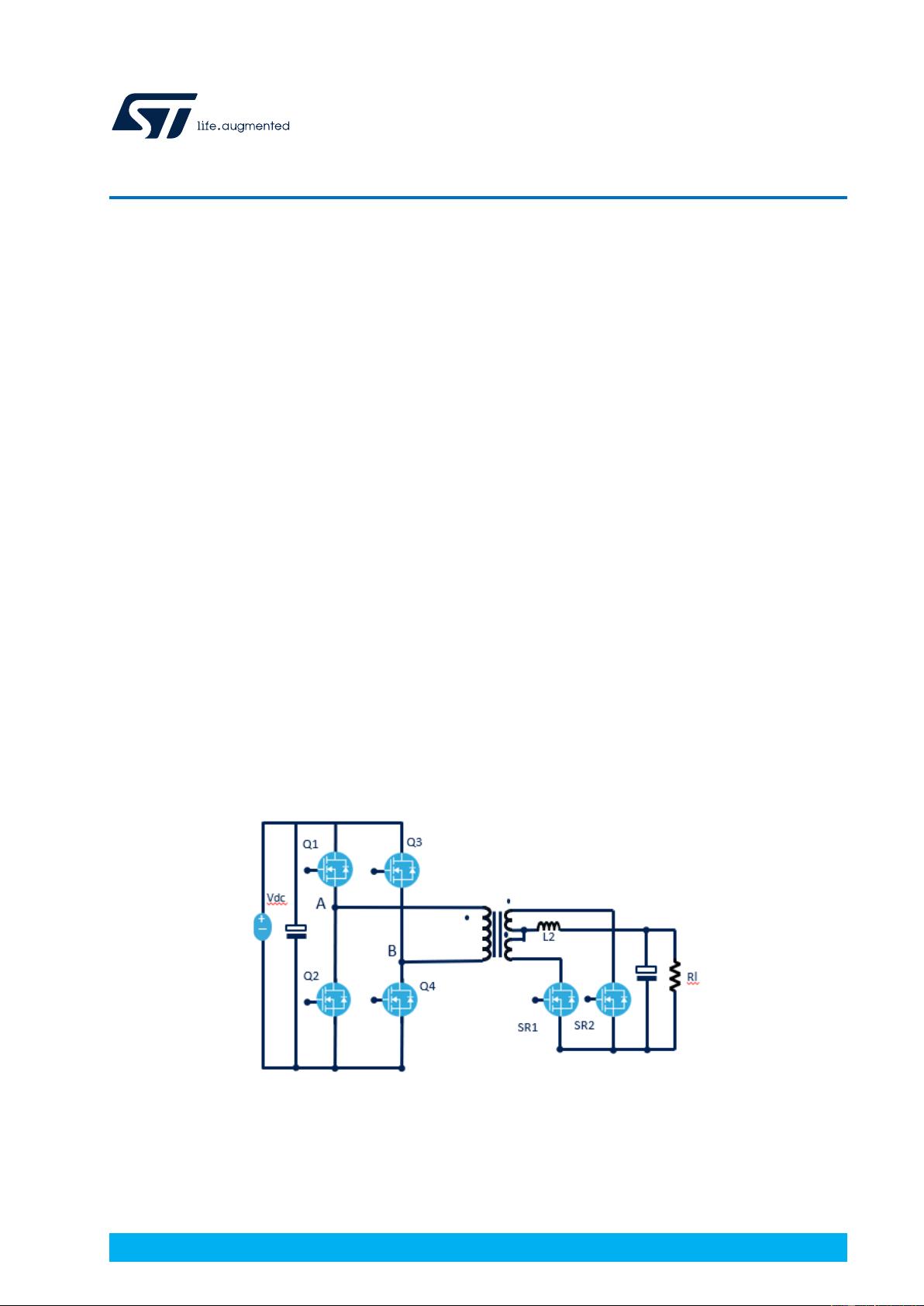
2. 全桥峰值电流控制波形要求
比如在下图的全桥变换器中,Q1/Q4 为超前臂,Q2/Q3 为滞后臂,根据客户的要求,对应
驱动波形如图所示。在没有发生峰值电流比较事件时,Q1/Q4 和 Q2/Q3 都按最大允许脉宽输
出,二者脉宽相同;当峰值电流比较事件使 Q1/Q4 关断后,其脉宽需要被复制到 Q2/Q3 上,保
证二者脉宽相同。
下载后可阅读完整内容,剩余6页未读,立即下载
2024-03-15 上传
2024-03-15 上传
2024-04-17 上传
2024-03-28 上传
2024-03-15 上传
2024-04-19 上传
2024-03-15 上传
2024-03-15 上传
128 浏览量

冻结的鱼
- 粉丝: 2750
 我的内容管理
展开
我的内容管理
展开







最新资源
- Web远程教学系统需求分析指南
- 禅道6.2版本发布,优化测试流程,提高安全性
- Netty传输层API中文文档及资源包免费下载
- 超凡搜索:引领搜索领域的创新神器
- JavaWeb租房系统实现与代码参考指南
- 老冀文章编辑工具v1.8:文章编辑的自动化解决方案
- MovieLens 1m数据集深度解析:数据库设计与电影属性
- TypeScript实现tca-flip-coins模拟硬币翻转算法
- Directshow实现多路视频采集与传输技术
- 百度editor实现无限制附件上传功能
- C语言二级上机模拟题与VC6.0完整版
- A*算法解决八数码问题:AI领域的经典案例
- Android版SeetaFace JNI程序实现人脸检测与对齐
- 热交换器效率提升技术手册
- WinCE平台CPU占用率精确测试工具介绍
- JavaScript实现的压缩包子算法解读
