STM32电机控制与PID算法实现
需积分: 0 139 浏览量
更新于2024-08-04
收藏 1.23MB DOCX 举报
"编程文档1主要涉及了单片机编程中的电机控制、OLED显示屏、PID算法、PWM调速和定时器应用等关键模块的实现,涵盖了从硬件连接到软件编写全过程。"
在单片机编程中,电机控制是至关重要的部分。在描述中提到的电机控制函数编写中,首先需要初始化IO口为输出,这意味着设置相应的GPIO引脚为推挽输出模式,以便能够驱动电机。然后,编写PWM绝对值函数,这通常是根据需求设定PWM信号的占空比,以控制电机的速度或转矩。PWM(脉宽调制)通过改变占空比来模拟不同电压,进而改变电机的转速。
OLED代码移植涉及到在单片机上运行OLED显示屏的驱动程序,用于实时显示实验数据。OLED初始化包括设置I2C通信接口、初始化显示屏控制器等步骤,以便于向屏幕发送数据和指令。
PID算法实现是控制系统的核心,用于根据误差调整电机的转速。PID算法包括比例、积分和微分三个部分,通过对这三个参数的合理设定,可以实现精确的控制。
PWM编写中,需要开启IO口复用时钟,设置TIM(定时器)的ARR(自动重载寄存器)和PSC(预分频器),以确定PWM周期和频率。同时,设置PWM模式和通道方向,使能输出,最后配置中断处理,确保系统能够根据PWM变化做出及时响应。
定时器编写包括开启TIM时钟,设置ARR和PSC以确定采样周期,配置中断分组并使能中断。定时器中断服务函数将被用于处理周期性任务,如计算速度或更新控制参数。
主函数`int main(void)`包含了所有模块的初始化,如延时函数、中断、OLED、PWM、定时器和电机初始化。在主循环中,会调用OLED显示函数来更新显示信息。
其他中断函数编写可能包括电机控制、PWM更新或其他特定事件的处理。这部分代码确保了系统对各种外部事件的响应能力。
最后,效果展示通常会呈现实际运行中的系统表现,如电机是否按照预期运动,OLED上显示的数据是否准确等。
这个编程文档详细阐述了一个基于单片机的电机控制系统的设计与实现,涵盖了从硬件接口到软件算法的多个关键环节。
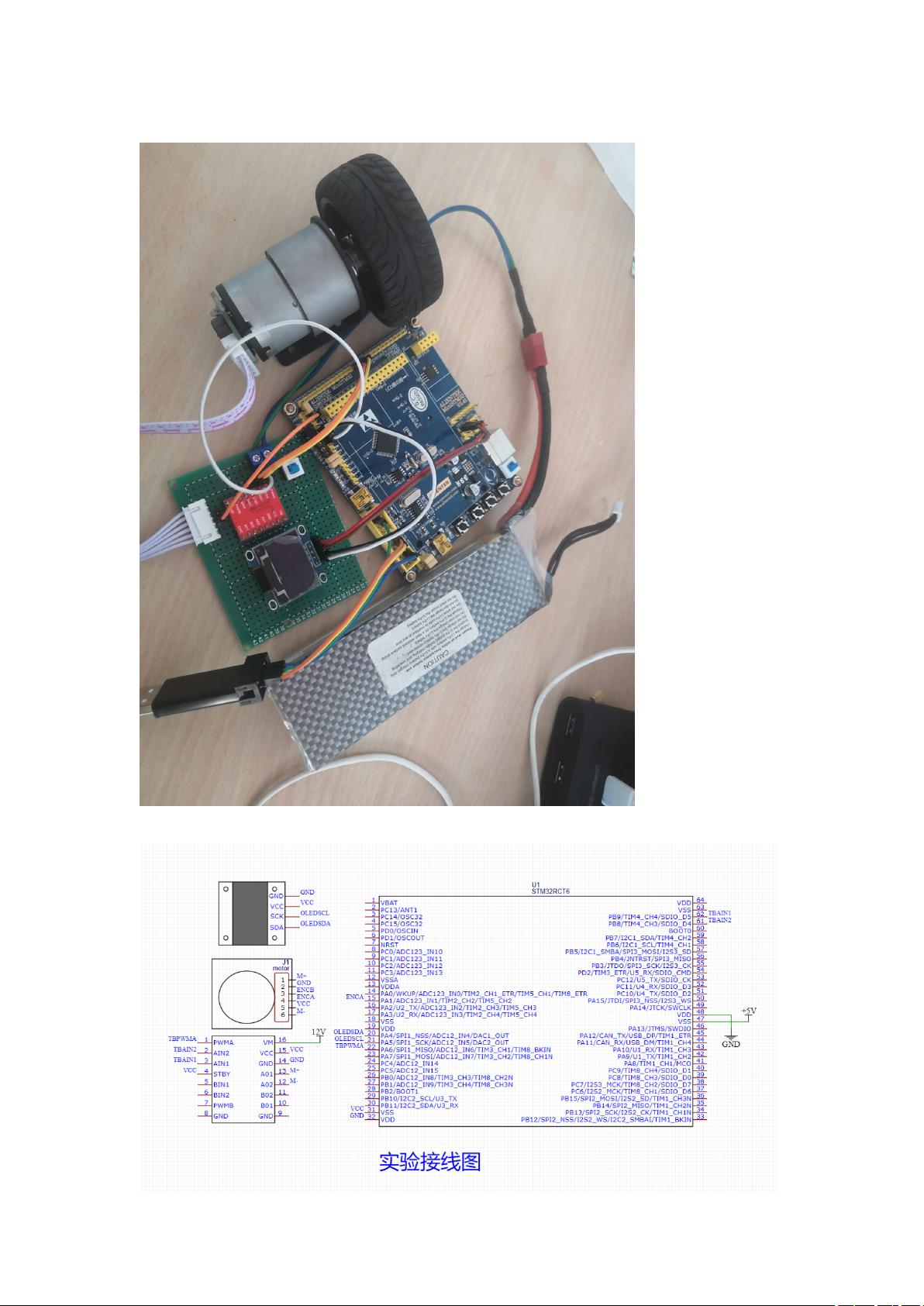
一、产品实物
二、硬件连接
下载后可阅读完整内容,剩余4页未读,立即下载
118 浏览量
360 浏览量
253 浏览量
951 浏览量
2447 浏览量
2007-10-01 上传

蒋寻
- 粉丝: 30
- 资源: 319
 我的内容管理
展开
我的内容管理
展开







最新资源
- pg_cron:在PostgreSQL中运行定期作业
- Simple Shooting Game using JavaScript with Free Source Code.zip
- Project SoFi-开源
- LopiPusherBundle:捆绑使用Pusher App
- 西门子WinCC_flexible 电子学习解决方案.rar
- skrubbed.github.io:egs d
- DS-UWB.rar_DS-UWB_宽带信号_超宽带_超宽带信号
- jspm驾校学员管理系统毕业设计程序
- JS6.Booleansen[removed]JS 6。 布尔值JavaScript
- Simple Product Inventory System using
- NuQLeus:通过解析器级别的性能指标和错误跟踪来增强GraphQL端点测试功能
- GNSS_SDR_a.zip_GNSS_GNSS_SDR_a_伪卫星_北斗跟踪
- 高斯白噪声matlab代码-PARCS:使用成对的自适应回归累加器(PARCS)检测多个变化点
- Optimierung-开源
- UCGUI学习资料.rar
- css-essentials-css-issue-bot-9000-den01-seng-ft-062220
