惯性传感器详解:加速度计与陀螺仪
需积分: 0 49 浏览量
更新于2024-08-04
收藏 208KB DOCX 举报
"这篇指南深入浅出地介绍了惯性MEMS传感器,特别是加速度计和陀螺仪,以及它们在IMU(惯性测量单元)中的应用。文章以USBThumb设备为例,阐述了如何从传感器读取ADC数据并转换为实际物理单位,同时探讨了如何结合两种传感器的数据来准确获取设备相对于地平面的倾角。文中强调了简单方法的重要性,避免了复杂的数学运算,适合拥有基础数学知识的读者。此外,文章还以作者设计的6自由度Acc_GyroAccelerometer+GyroIMU模块为例,该模块包括LIS331AL 3轴2G加速度计、LPR550AL双轴500°/s加速度传感器和LY550ALH单轴陀螺仪,展现了这些设备的集成使用情况。"
在加速度计部分,文章首先引导读者将加速度计想象成一个球在无重力环境中的盒子里,以便理解其工作原理。加速度计能够检测到作用在物体上的线性加速度,包括由于地球引力产生的重力加速度。在地球上,一个理想的加速度计在静止时会测量到1g的重力加速度,方向指向地心。通过测量加速度计在三个正交轴上的读数,可以确定物体相对于重力的方向和角度变化。
陀螺仪(gyroscope),另一方面,检测的是旋转速率,即物体转动的速度。这在理解设备的姿态和动态运动中至关重要。例如,一个双轴陀螺仪可以测量俯仰(pitch)和翻滚(roll)角度,而单轴陀螺仪则可以检测偏航(yaw)角度,三者共同提供了设备的完整姿态信息。
文章接着指出,将加速度计和陀螺仪的数据结合,可以通过积分和简单的三角函数计算来估算设备的精确倾斜角度。这种方法虽然不如复杂的滤波算法(如卡尔曼滤波)精确,但对于许多嵌入式系统来说,它更易于实现且资源消耗较低。
通过具体实例和简化的方法,本文为初学者提供了一个理解和应用加速度计和陀螺仪的良好起点,同时也为那些寻求简单解决方案的工程师提供了实用的指导。对于想要掌握惯性传感器基本知识的人来说,这是一个有价值的资源。
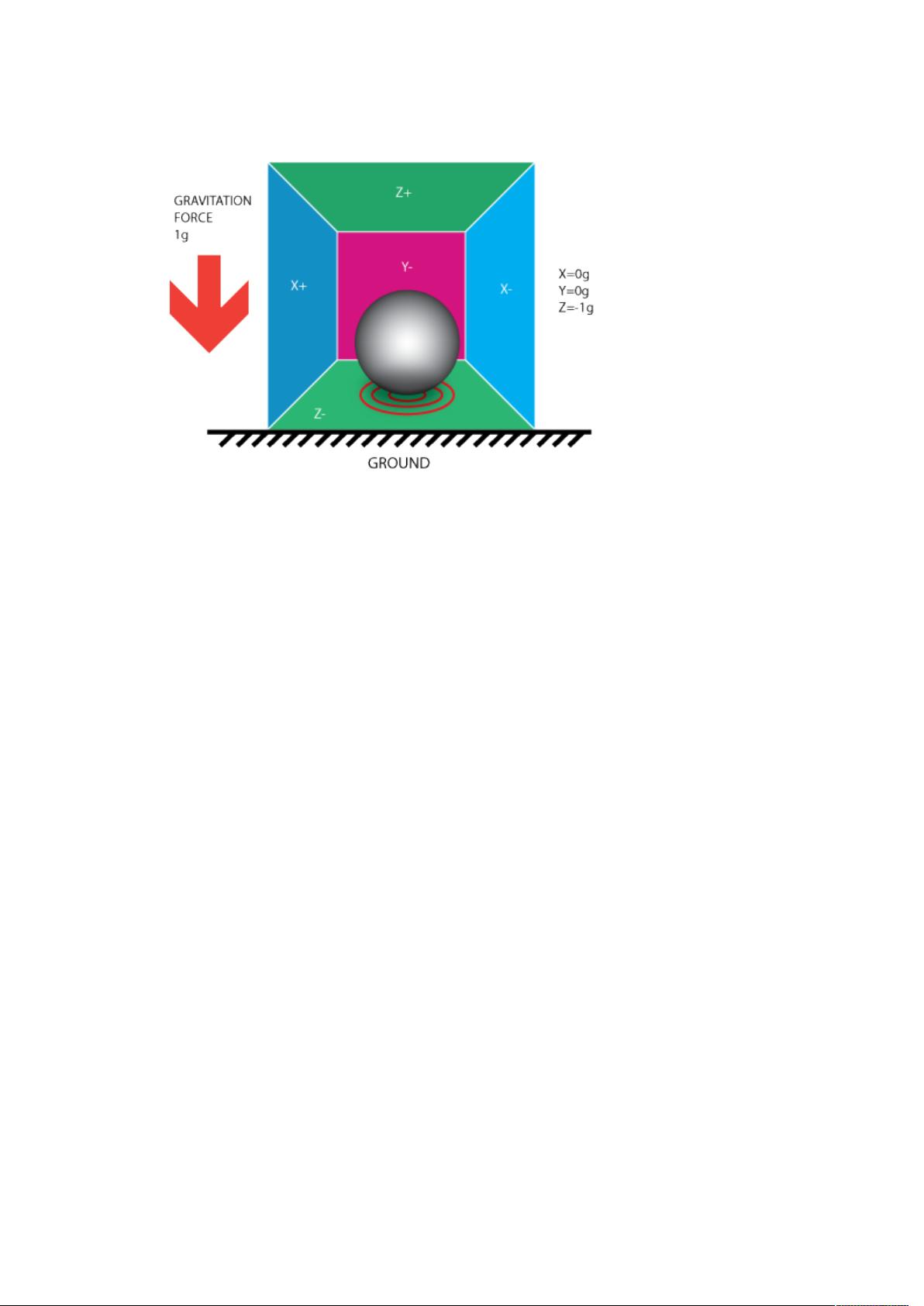
如果我们把模型放在地球上,球会落在 Z-墙面上并对其施加一个 1g 的力,见下图:
在这种情况下盒子没有移动但我们任然读取到 Z 轴有-1g 的值。球在墙壁上施加的压力是由
引力造成的。在理论上,它可以是不同类型的力量 - 例如,你可以想象我们的球是铁质的,
将一个磁铁放在盒子旁边那球就会撞上另一面墙。引用这个例子只是为了说明加速度计的本
质是检测力而非加速度。只是加速度所引起的惯性力正好能被加速度计的检测装置所捕获。
虽然这个模型并非一个 MEMS 传感器的真实构造,但它用来解决与加速度计相关的问题相
当有效。实际上有些类似传感器中有金属小球,它们称作倾角开关,但是它们的功能更弱,
只能检测设备是否在一定程度内倾斜,却不能得到倾斜的程度。
到目前为止,我们已经分析了单轴的加速度计输出,这是使用单轴加速度计所能得到的。三
轴加速度计的真正价值在于它们能够检测全部三个轴的惯性力。让我们回到盒子模型,并将
盒子向右旋转 45 度。现在球会与两个面接触:Z-和 X-,见下图:
剩余13页未读,继续阅读
2021-10-02 上传
2021-02-17 上传
2015-04-03 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-12-19 上传
2019-05-07 上传

鸣泣的海猫
- 粉丝: 25
- 资源: 292
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
