基于模糊控制的非最小相位系统设计分析
版权申诉
"这篇文档是兰州理工大学电气工程与信息工程学院自动化卓越班的一份智能控制课程的结课设计报告,主题是基于模糊控制的非最小相位系统设计。报告介绍了如何利用模糊控制理论构建控制规则库,通过MATLAB和Simulink进行系统仿真,展示模糊控制在非最小相位系统中的应用和优势。"
在智能控制领域,模糊控制是一种重要的控制策略,尤其适用于那些难以用传统数学模型精确描述的复杂系统,如非最小相位系统。非最小相位系统是指其传递函数具有负实部零点的系统,这样的系统在控制上具有挑战性,因为它们可能导致系统不稳定或响应速度慢。本报告中,设计者首先假设系统的模型为二阶加纯滞后形式,即传递函数为 \( G(s) = \frac{K}{(1 + T_{f1}s)(1 + T_{f2}s)} \),并给出了具体的参数值。
模糊控制的核心在于利用专家经验建立控制规则库。在这个案例中,控制规则库基于误差E、误差变化率EC和控制量U的模糊集合及其论域。模糊集合包括 {NB, NM, NS, 0, PS, PM, PB},表示负大、负中、负小、零、正小、正中、正大。每个变量的论域为一个连续的数值区间,以实现对不同范围误差的覆盖。为了提高稳态精度,每个集合都选择了7个元素。
设计中,定义了E、EC和U的隶属度函数,这些函数决定了每个模糊集内变量的“模糊”程度。报告中虽未提供具体图形,但通常这些函数可以是高斯型、三角型或梯形等,以体现从边界到中心的逐渐增大或减小的隶属度。模糊控制规则是基于这些模糊集合和隶属度函数设计的,它决定如何根据当前误差和误差变化来调整控制输出。
在实际操作中,设计者使用MATLAB的Simulink工具箱构建了模糊控制系统的仿真模型。该模型包括控制器、被控对象、输入输出接口等多个模块,如图1所示。通过仿真,可以观察系统对给定输入的跟踪性能,并绘制阶跃响应曲线,从而评估系统的动态性能,如响应速度、超调量和稳定性。
通过仿真实验,结果显示模糊控制算法在非最小相位系统中有良好的控制效果,表现为快速的响应速度、较小的超调以及较高的稳态精度。这证明了模糊控制在处理非线性和不确定性问题时的有效性,特别是在没有精确系统模型的情况下。
总结来说,这份报告详细展示了模糊控制理论在解决非最小相位系统控制问题上的应用,突出了模糊控制的自适应性和实用性,以及其在复杂系统控制中的潜力。通过实际的MATLAB仿真,进一步验证了模糊控制在提升系统性能方面的优势。
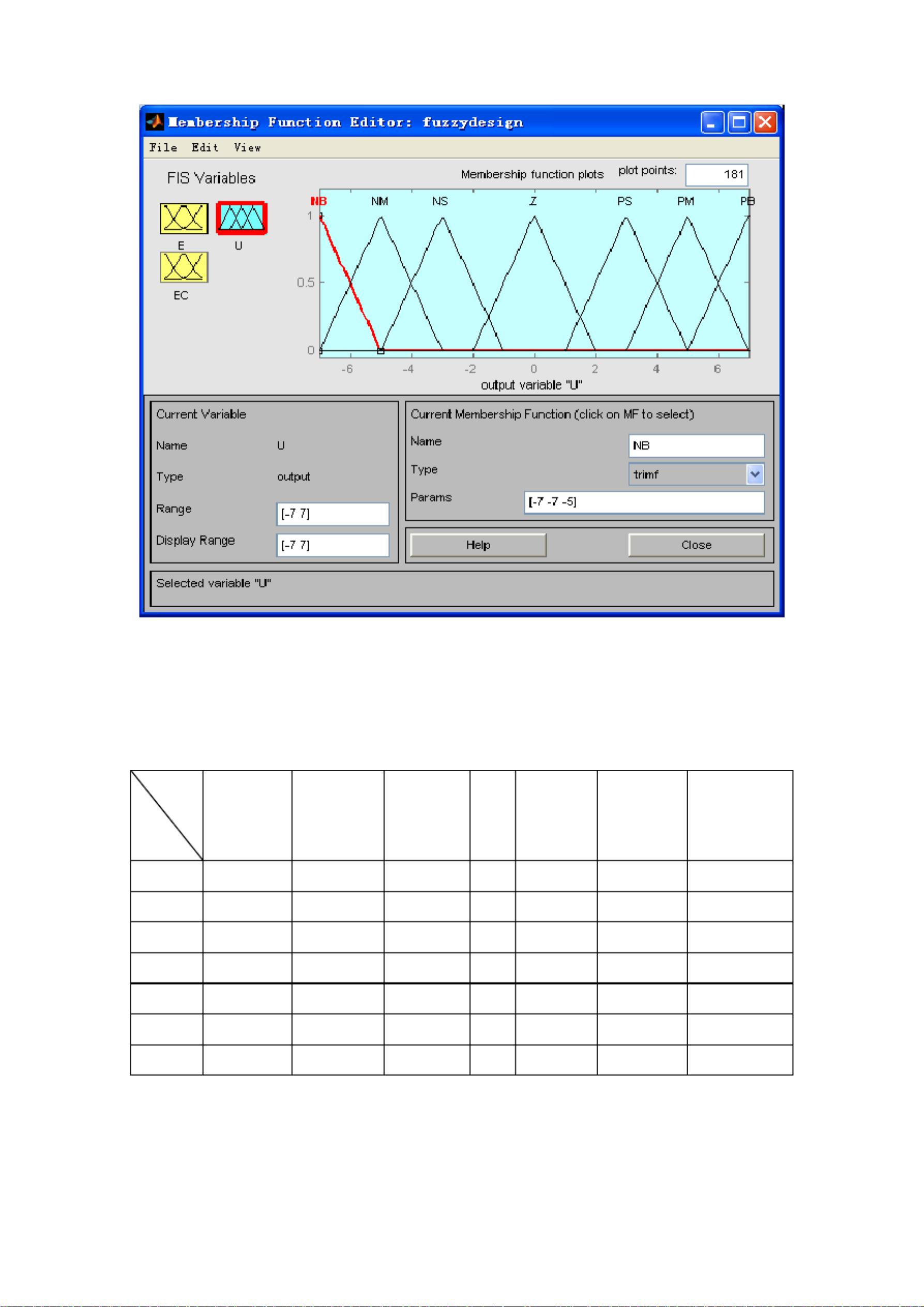
图 4 变量 U 的隶属度函数
(2)模糊控制规则设计
模糊控制规则如下表所示:
表 1 模糊控制规则
E
U
EC
NB
NM
NS
0
PS
PM
PB
PS
NS
NM
NB
NB
NB
NB
PS
PS
NS
NM
NM
NB
NB
PS
PS
0
NS
NS
NM
NM
PS PM
PS PM
0
0
0
PS
PS
0
PB
PM
PM
PM
PS
PS
NS
PB
PB
PM
PM
PM
PS
PS
NB NM NS 0 PS PM PB
NS NS
NS NS
(3)系统的参数选择
系统所选用的参数为:Saturation、Saturation1、Saturation2 的范围分别为:
剩余17页未读,继续阅读
106 浏览量
2022-11-03 上传
2022-11-18 上传
2021-10-06 上传
2023-06-12 上传
2021-10-12 上传

xxpr_ybgg
- 粉丝: 6830
 我的内容管理
展开
我的内容管理
展开







最新资源
- 自动生成CAD模型文件的测试流程
- 掌握JavaScript中的while循环语句
- 宜科高分辨率编码器产品手册解析
- 探索3CDaemon:FTP与TFTP的高效传输解决方案
- 高效文件对比系统:快速定位文件差异
- JavaScript密码生成器的设计与实现
- 比特彗星1.45稳定版发布:低资源占用的BT下载工具
- OpenGL光源与材质实现教程
- Tablesorter 2.0:增强表格用户体验的分页与内容筛选插件
- 设计开发者的色值图谱指南
- UYA-Grupo_8研讨会:在DCU上的培训
- 新唐NUC100芯片下载程序源代码发布
- 厂家惠新版QQ空间访客提取器v1.5发布:轻松获取访客数据
- 《Windows核心编程(第五版)》配套源码解析
- RAIDReconstructor:阵列重组与数据恢复专家
- Amargos项目网站构建与开发指南
