KUKA.RoboTeam 3.1:多控制系统协同作业解决方案
下载需积分: 50 | PDF格式 | 3.32MB |
更新于2024-07-09
| 12 浏览量 | 举报
"KST_RoboTeam_31_zh.pdf"
KUKA.RoboTeam 3.1 是一款先进的控制系统协作解决方案,它允许最多六个控制系统,包括机器人和附加轴运动系统,形成一个团队,实现协同作业。这款系统的核心在于它的程序和运动协调能力,使得不同控制器之间能有效地分配任务、交换消息、变量信息和指令。KUKA.RoboTeam 不仅仅是一个简单的机器人控制系统,它还能承担PLC(可编程逻辑控制器)的功能,确保在所有控制系统的数据交换过程中保持高效和准确。
在KUKA.RoboTeam 3.1中,所有的通信都是通过系统总线进行的,这意味着数据传输速度快且可靠。该系统适用于KUKA System Software 8.6和8.7以及VW System Software 8.6和8.7。发布日期为2020年11月27日,由KUKA Deutschland GmbH发行。尽管文档中提到了可能存在的其他功能,但用户无权在新供货或维修时强制要求提供这些额外功能。
文档中详细介绍了各种功能,如程序同步和运动同步,两者都是为了确保多机器人系统中的精确操作。运动同步允许机器人按照预定的时间关系执行动作,而程序同步则涉及不同控制器间的程序协调。几何耦合是另一个关键特性,特别是对于主、辅机器人协作。这种耦合方式可以分为几种作业方式,如负载分配作业方式(几何耦合),线性滑轨上的机器人作业方式,依赖于加工过程的作业方式(间接几何耦合),以及组合式作业方式。此外,还有一种扩展的主、辅机器人原理,增加了系统灵活性。
共同的工作区域是KUKA.RoboTeam 3.1的另一个重要方面,它定义了机器人可以在不发生冲突的情况下同时工作的空间。用户必须了解按规定使用和违规使用的区别,以确保安全操作。安全是这个系统设计中的重要因素,文档中也专门有一章节讨论安全措施。
安装过程包括系统前提条件的检查,如硬件和软件兼容性,以及RoboTeam的安装或更新步骤。卸载RoboTeam的流程也在文档中有所提及,以帮助用户在必要时正确地移除该系统。
KUKA.RoboTeam 3.1是为工业自动化设计的一款强大工具,它通过复杂的同步机制和灵活的协作模式,提升了多机器人系统的效率和协调性,同时考虑到了安全和易用性。
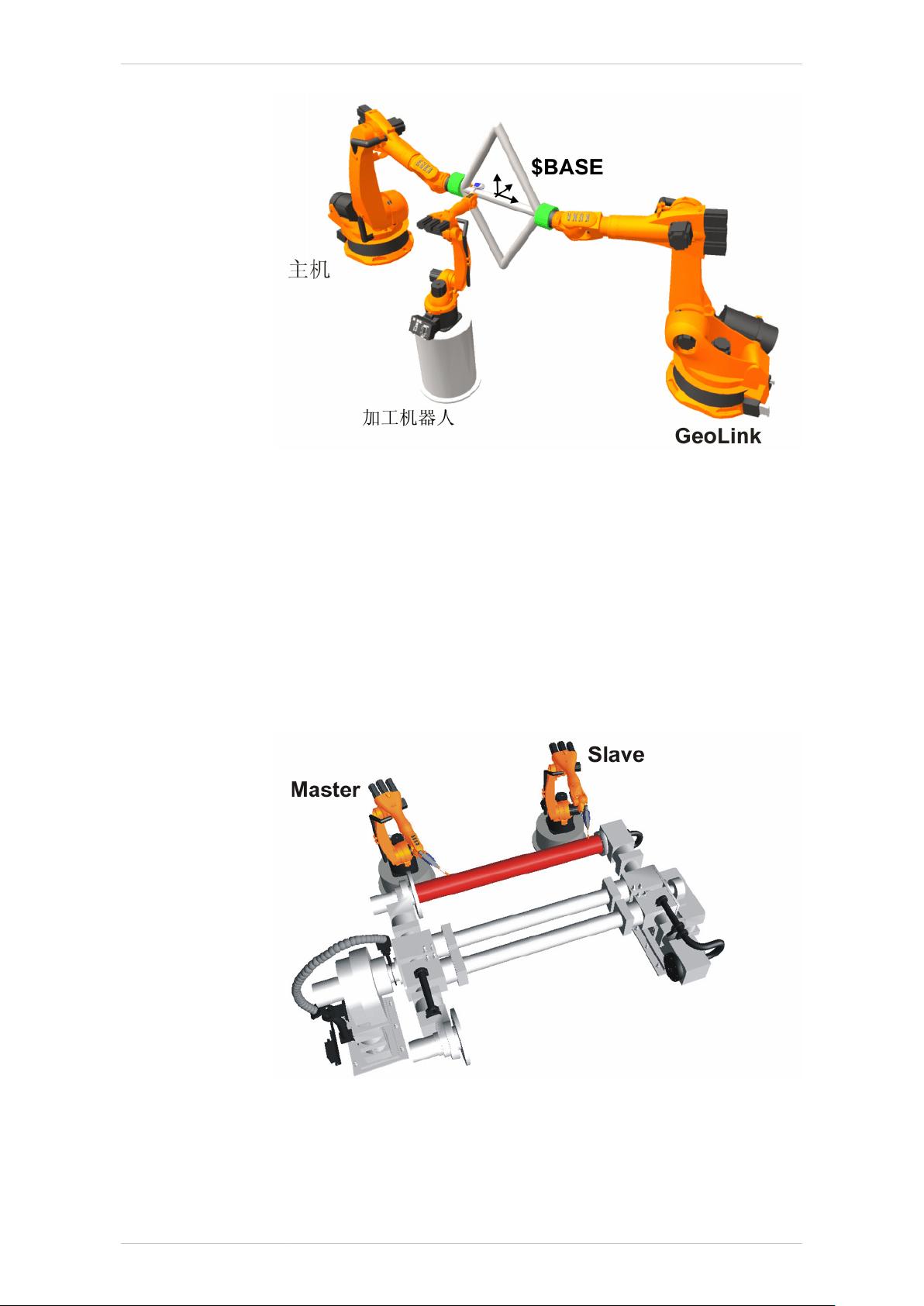
图 2-7: 组合式作业方式
两个机器人在负载分配的作业方式下导引一个工件并且使其由第三个机器人加
工。 2 个辅机器人与主机器人几何耦合,此时辅机器人 1 与主机器人一起
在负载分配的作业方式下工作,而辅机器人 2 在依赖于加工过程的作业方式
下工作。
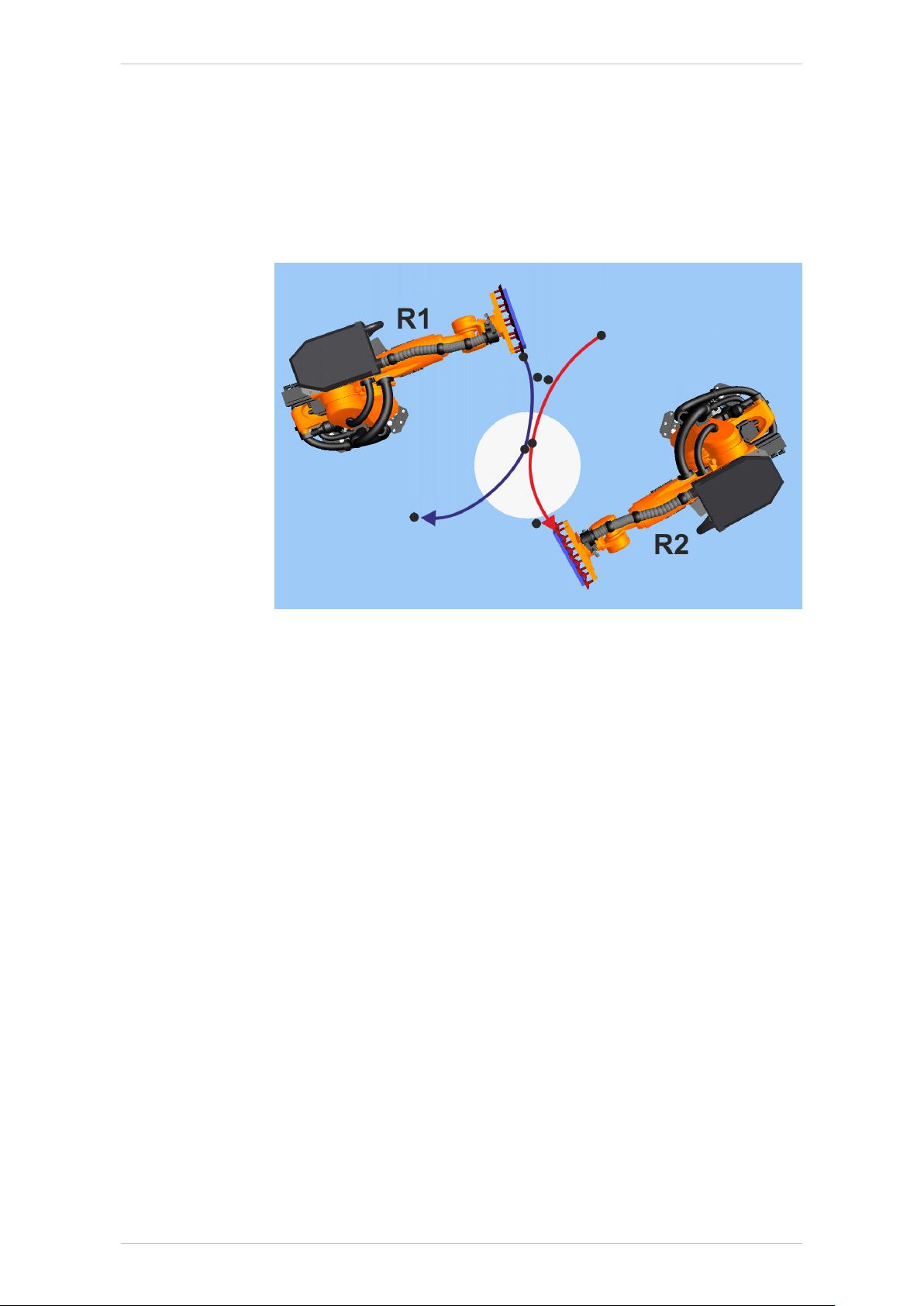
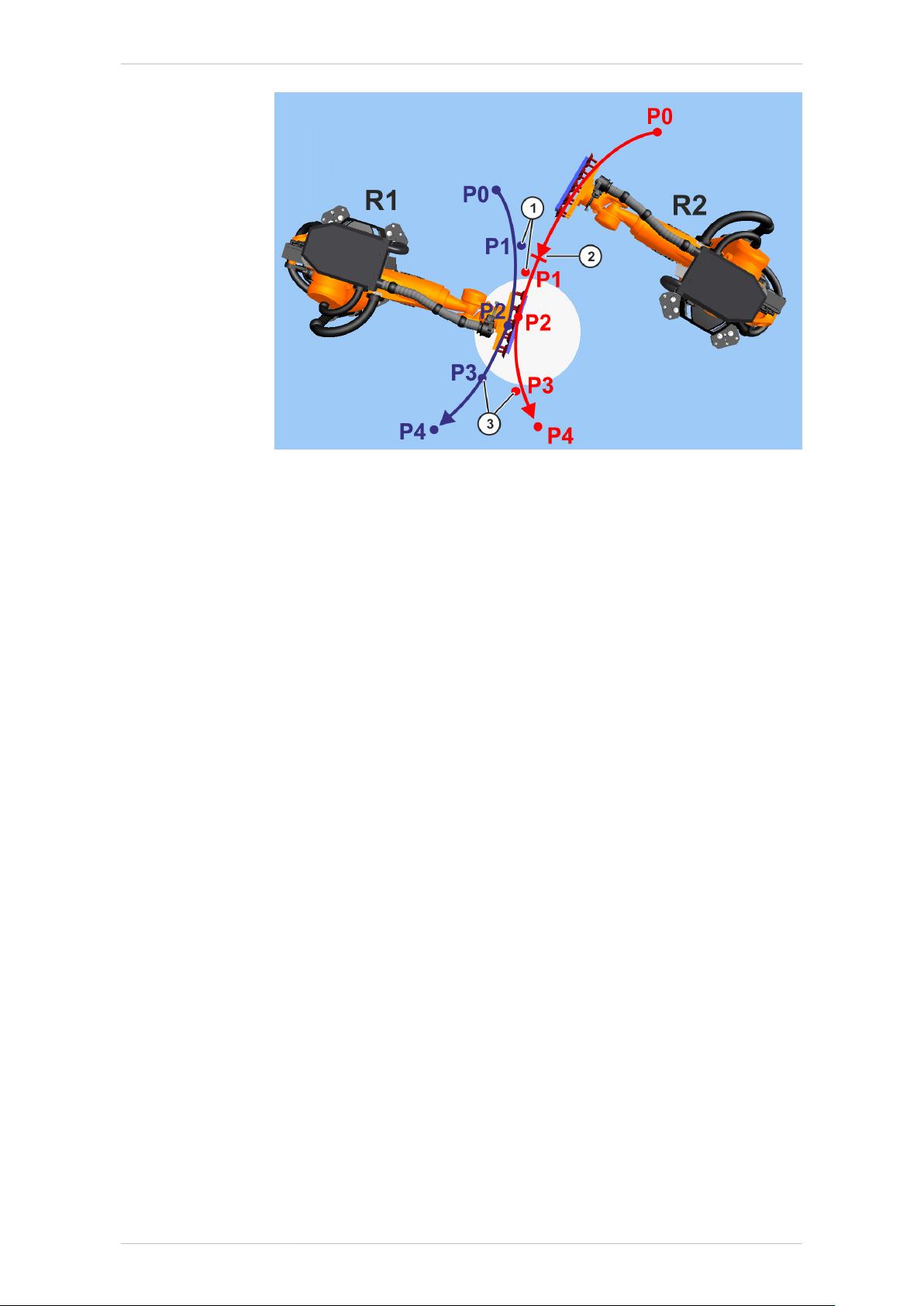
2.4.4 扩展的主、辅机器人原理
扩展的主、辅机器人原理以两个或多个带附加轴运动系统的机器人(如线性滑
轨、旋转台)的协作为基础。 主机器人与活动的附加轴运动系统连接,并且
与另一个在附加轴运动系统上的机器人一起进行几何耦合作业。 耦合可以以
在主机器人上配置的每个外部基点为基准。
图 2-8: 扩展的主、辅机器人原理
KUKA.RoboTeam 3.1
14/81 | www.kuka.com KST RoboTeam 3.1 V2 | 发布日期: 27.11.2020
产品说明
剩余80页未读,继续阅读
相关推荐




weixin_45814570
- 粉丝: 12
 我的内容管理
展开
我的内容管理
展开








最新资源
- MATLAB周期LQ状态反馈离散Riccati方程求解器
- 掌握Direct3D:灯光与纹理渲染示例
- Spring 4.2.2与Quartz 2.2.2任务调度实例解析
- 深入分析802.11 WLAN吞吐率与Goodput性能
- 启胜财务系统4.0:轻巧实用的财务管理工具
- P5编辑器基本库文件分析与应用
- Java JDK 8 Update 291 for Linux x64 发布
- MATLAB开发中的紧致模糊模型与粗细集理论
- SQL Server 2008客户端数据库管理与应用
- 基于源代码构建的电子商务商城网站制作教程
- MFC图形按钮控件使用详解:CBitmapButton类应用
- Simulink实现气相色谱仪控制原理与模拟
- HALCON12双目标定教程:附带标定图像资源分享
- ScanPort:免费且可自定义IP及端口扫描工具
- iBATIS账户密码管理功能实现示例
- Winform窗体美化:加载进度控件与皮肤应用











