Robotics Toolbox for Python: 25 Years Later
需积分: 5 23 浏览量
更新于2024-08-05
收藏 511KB PDF 举报
"这篇论文介绍了Robotics Toolbox for Python,它是MATLAB版本的机器人工具箱的继承者,利用Python的优势和开源资源提供了平台可移植性、快速的基于浏览器的3D图形、高质量的文档、高效的数值和符号运算、强大的集成开发环境(IDE)以及可分享和网络浏览的笔记本文档。新工具箱保留了经典的机器人学功能,如空间数学、轨迹规划、运动学和动力学,同时也新增了分支机构、碰撞检测、URDF导入以及与CoppeliaSim、ROS和Dynamixel伺服电机的接口等功能。"
《Python版机器人工具箱:传承与创新》
自25年前MATLAB的Robotics Toolbox面世以来,它在全世界的教学和研究领域发挥了重要作用。如今,新一代的Robotics Toolbox for Python应运而生,不仅延续了其经典功能,更充分利用Python的特性和开源生态,实现了诸多创新。
首先,Python的普及性和跨平台特性使得新工具箱具备了出色的平台可移植性。无论是在Windows、Linux还是macOS上,用户都能无缝使用。同时,基于Web的3D图形渲染引擎让可视化效果更加生动,无需安装额外软件,用户只需通过浏览器就能进行三维模型的查看和交互。
新工具箱还强调了文档的质量和完整性,这得益于Python社区的文档编写规范和GitHub等协作平台的支持。用户可以方便地查找、学习和分享相关资料,极大地提高了学习效率。此外,Python的简洁语法使得工具箱的函数更加直观易用,同时,Python的强大计算能力确保了数值和符号运算的高效。
集成开发环境(IDE)在新工具箱中扮演了重要角色,提供了便捷的代码编辑、调试和版本控制功能。此外,结合Jupyter Notebook,用户可以创建可分享的、交互式的编程笔记,这在教学和项目合作中极具价值。
在功能上,新工具箱保留了原有的核心功能,包括空间数学中的齐次变换、四元数、三轴旋转和扭角,以及从零阶到二阶的运动学和动力学计算。同时,新增了对分支机构的支持,允许用户处理更复杂的机械结构。碰撞检测功能则提升了模拟仿真中的真实感,确保了机器人在虚拟环境中的安全操作。URDF(Universal Robot Description Format)的导入能力使得与其他机器人系统的互操作性得到增强。
新工具箱还引入了对CoppeliaSim仿真平台、ROS(Robot Operating System)操作系统以及Dynamixel伺服电机的接口,这使得它能更好地融入实际的机器人系统开发流程中,提供了从设计、仿真到实际部署的完整解决方案。
总结来说,Robotics Toolbox for Python是MATLAB工具箱的一次革新,它结合了Python的优势,扩展了功能,并强化了协作和学习体验,是当前机器人学领域不可或缺的开发工具之一。无论是初学者还是资深研究人员,都能从中受益匪浅。
Not your grandmother’s toolbox – the Robotics Toolbox reinvented for Python
Peter Corke
1
, Jesse Haviland
1
Abstract— For 25 years the Robotics Toolbox for MATLAB
R
has been used for teaching and research worldwide. This paper
describes its successor – the Robotics Toolbox for Python.
More than just a port, it takes advantage of popular open-
source packages and resources to provide platform portability,
fast browser-based 3D graphics, quality documentation, fast
numerical and symbolic operations, powerful IDEs, shareable
and web-browseable notebooks all powered by GitHub and
the open-source community. The new Toolbox provides well-
known functionality for spatial mathematics (homogeneous
transformations, quaternions, triple angles and twists), tra-
jectories, kinematics (zeroth to second order), dynamics and
a rich assortment of robot models. In addition, we’ve taken
the opportunity to add new capabilities such as branched
mechanisms, collision checking, URDF import, and interfaces to
CoppeliaSim, ROS and Dynamixel servomotors. With familiar,
simple yet powerful functions; the clarity of Python syntax;
but without the complexity of ROS; users from beginner to
advanced will find this a powerful open-source toolset for
ongoing robotics education and research.
I. INTRODUCTION
The Robotics Toolbox for MATLAB
R
(RTB-M) was cre-
ated around 1991 to support the first author’s PhD research
and was first published in 1995-6 [1][2]. It has evolved
over 25 years to track changes and improvements to the
MATLAB language and ecosystem, such as the addition of
structures, objects, lists (cell arrays) and strings, myriad other
improvements to the language, new graphics and new tools
such as an IDE, debugger, notebooks (LiveScripts), apps and
continuous integration. An adverse consequence is that many
poor early design decisions hinder development.
Over time additional functionality was also added, in
particular for vision, and two major refactorings led to
the current state of three toolboxes: Robotics Toolbox for
MATLAB and Machine Vision Toolbox for MATLAB (1999)
both of which are built on the Spatial Math Toolbox for
MATLAB (SMTB-M) in 2019 [3]. The code was formally
open sourced to support its use for the third edition of John
Craig’s book [4]. It was hosted on ftp sites, personal web
servers, Google code and currently GitHub and maintained
under a succession of version control tools including rcs,
cvs, svn and git. A support forum on Google Groups was
established in 2008 and currently has over 1400 members.
This paper describes the motivation and design of the
Robotics Toolbox for Python, and illustrates key features in
a tutorial fashion.
1
Peter Corke and Jesse Haviland are with the Australian Centre for
Robotic Vision (ACRV), Queensland University of Technology Centre for
Robotics (QCR), Brisbane, Australia peter.corke@qut.edu.au,
j.haviland@qut.edu.au. This research was conducted by the Australian
Research Council project number CE140100016, and supported by the QUT
Centre for Robotics.
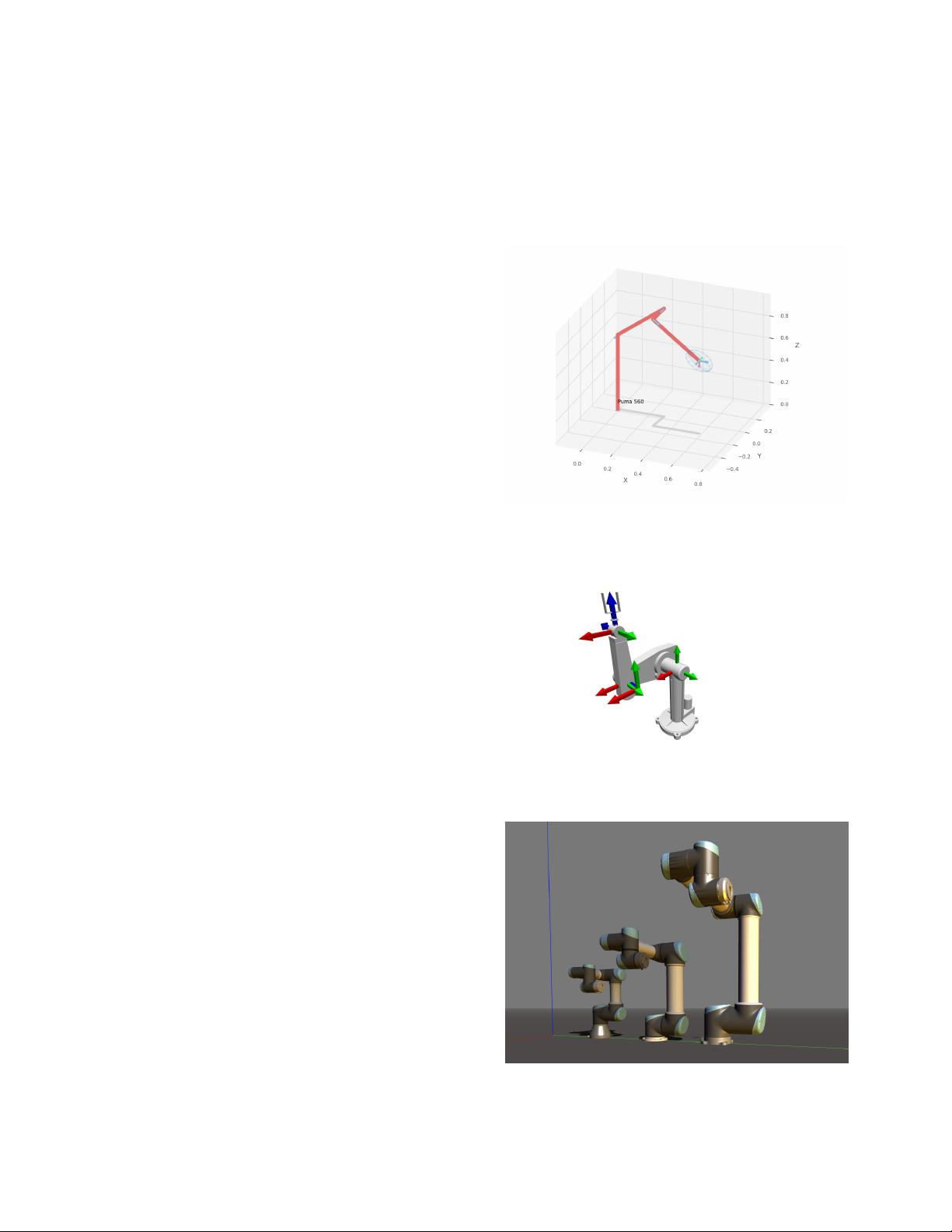
(a) Puma560, with a velocity ellipsoid, rendered using the default
matplotlib visualizer.
(b) Puma560 rendered using the web-based VPython visualizer.
(c) The Universal Robot family rendered using the Toolbox’s Swift
visualizer.
Fig. 1: The toolbox provides several visualizers
下载后可阅读完整内容,剩余6页未读,立即下载
2023-06-02 上传
2010-01-28 上传
2022-07-15 上传
2020-04-22 上传
点击了解资源详情
2023-05-20 上传
2012-05-08 上传
2009-02-27 上传

FL17171314
- 粉丝: 3w+
- 资源: 60
 我的内容管理
展开
我的内容管理
展开







最新资源
- angular-prism:在Angular应用程序中使用Prism语法荧光笔
- FriendList:该Web应用程序可以下载您的Facebook朋友列表,并允许您对它们进行排序
- 实用程序_1fdp:程序基础知识1
- 灰色按钮克星源码例程.zip易语言项目例子源码下载
- docker-traefik::mouse:使用Traefik代理Docker容器进行* .localhost开发
- lidlab:Lidstrom 实验室@华盛顿大学共享代码
- savagejsx:将svg转换为React成分的实用程序
- Leetcode-optimized-solution-in-java-with-clear-explanation
- A_CNS_API:HIMS CNS API代码
- laas:从数据驱动的角度出发,基于指令库的逻辑汇编和分发
- Media XW-开源
- Java资源 javaeasycms-v2.0.zip
- Lab7_WhoWroteIt
- 烟花newyearFireworks-master.zip
- JanChaMVC
- Maliwan-开源
