嵌入式应用中IMU(加速计与陀螺仪)的工作原理
需积分: 1 115 浏览量
更新于2024-07-23
1
收藏 746KB PDF 举报
"这篇资源详细介绍了加速传感器和陀螺仪的工作原理,并通过图示辅助讲解,内容来源于一位国外专家。文章主要关注嵌入式应用中惯性测量单元(IMU)的使用,特别是MPU6050这种常见的集成传感器。文章会探讨以下几个关键点:加速计的测量内容、陀螺仪(角速度传感器)的测量内容、如何将从传感器获得的模拟到数字(ADC)读数转换为物理单位,以及如何结合加速计和陀螺仪的数据以准确获取设备相对于地面平面的倾斜信息。文章旨在保持数学知识的最小化,即使只了解正弦、余弦和正切的基本概念,也能理解和应用到各种平台的项目中,如Arduino、Propeller、BasicStamp、Atmel芯片或Microchip PIC等。作者认为,虽然复杂的滤波器如卡尔曼滤波器或帕克-麦克莱伦滤波器可以实现更复杂的结果,但基本的数学知识已经足够处理IMU数据。"
在本文中,作者首先会解释加速计的工作原理。加速计是一种测量物体线性加速度的传感器,它可以检测设备在三个正交轴(x、y、z)上的加速度变化。在没有外力作用时,由于地球引力,加速计在垂直方向(通常为z轴)上通常会读出一个固定的值,这个值对应于重力加速度9.81 m/s²。在水平面上,如果设备静止,x和y轴的读数应该是零。然而,当设备移动或倾斜时,这些轴上的读数会发生变化,从而可以推断出设备的姿态。
接着,文章会介绍陀螺仪,它是一种测量旋转速率的传感器,也称为角速度传感器。陀螺仪能够感知设备围绕其轴线的旋转速度,同样有三个正交轴。陀螺仪的输出单位通常是度/秒(deg/s),表示设备每秒旋转的角度。结合加速计数据,陀螺仪可以帮助消除漂移,提供更精确的动态姿态信息。
然后,文章将涉及将ADC读数转换为物理单位的过程。ADC读数是传感器采集的原始电信号经过模数转换后的结果,通常需要根据传感器的规格和校准系数进行转换。例如,对于加速计,可能需要将ADC值乘以每个ADC单位对应的g值;对于陀螺仪,可能需要将ADC值除以时间常数并乘以相应的角速度系数。
最后,文章将讨论如何融合加速计和陀螺仪的数据,这通常通过互补过滤器或组合滤波器实现。例如,一种简单的融合方法是使用互补滤波器,结合加速计的长时间稳定性(在没有净加速度时保持恒定)和陀螺仪的快速响应能力(跟踪短时间内的旋转)。通过合适的权重分配,可以不断更新设备的姿态估计,从而提供更准确的倾斜角度。
这篇文章深入浅出地讲解了加速传感器和陀螺仪的基本原理,以及如何在实际应用中有效地利用它们。无论是初学者还是有一定经验的工程师,都能从中受益,理解如何从这些传感器获取有价值的信息,而无需涉及过于复杂的数学理论。

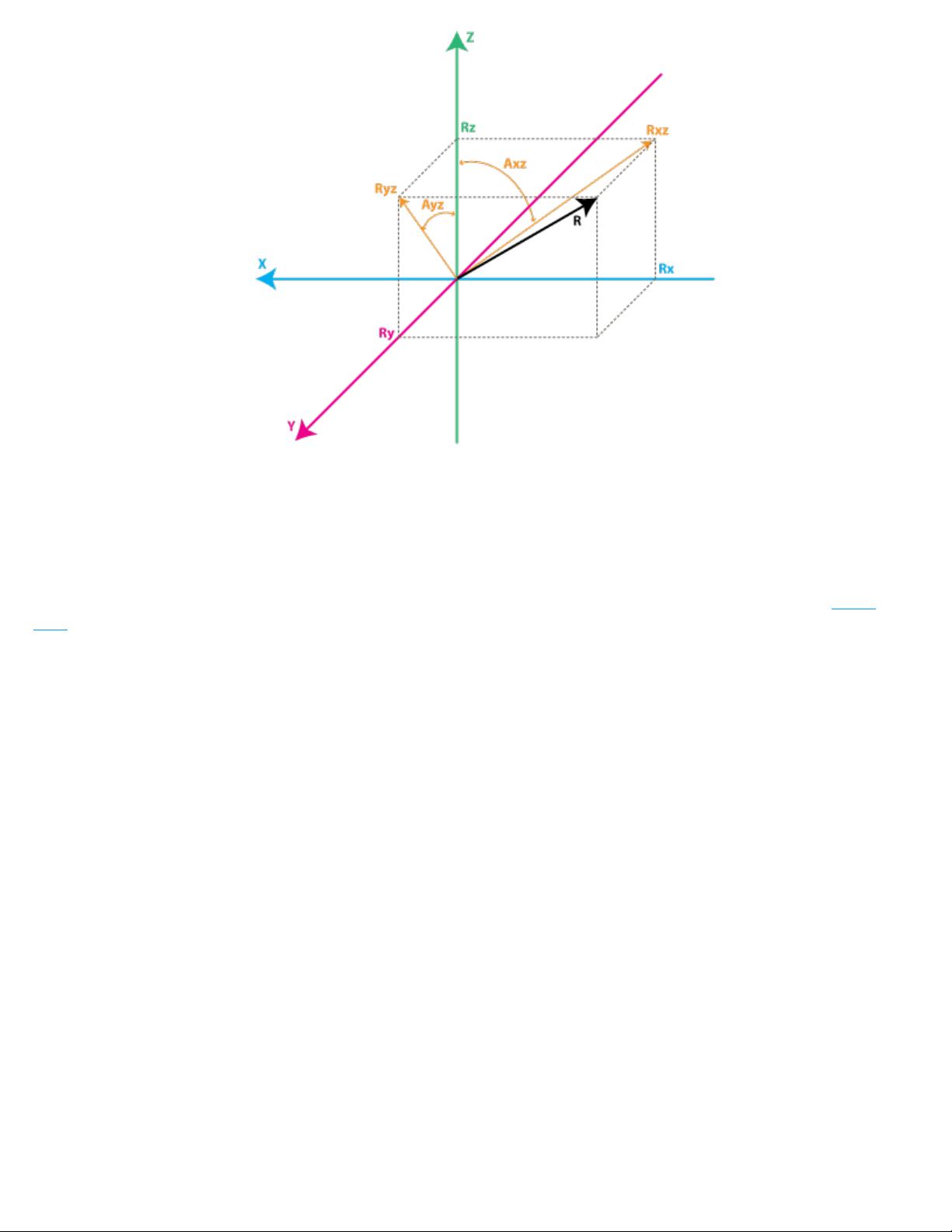
Please note that because Racc measures the gravitation force you'll be correct if you assume that the length of
this vector defined as follows is equal or close to 1g.
|Racc| = SQRT(RxAcc^2 +RyAcc^2 + RzAcc^2),
However to be sure it makes sense to update this vector as follows:
Racc(normalized) = [RxAcc/|Racc| , RyAcc/|Racc| , RzAcc/|Racc|].
This will ensure the length of your normalized Racc vector is always 1.
Next we'll introduce a new vector and we'll call it
Rest = [RxEst,RyEst,RzEst]
This will be the output of our algorithm , these are corrected values based on gyroscope data and based on past
estimated data.
Here is what our algorithm will do:
- accelerometer tells us: "You are now at position Racc"
- we say "Thank you, but let me check",
- then correct this information with gyroscope data as well as with past Rest data and we output a new
estimated vector Rest.
- we consider Rest to be our "best bet" as to the current position of the device.
Let's see how we can make it work.
We'll start our sequence by trusting our accelerometer and assigning:
Rest(0) = Racc(0)
By the way remember Rest and Racc are vectors , so the above equation is just a simple way to write 3 sets of
equations, and avoid repetition:
RxEst(0) = RxAcc(0)
RyEst(0) = RyAcc(0)
RzEst(0) = RzAcc(0)
Next we'll do regular measurements at equal time intervals of T seconds, and we'll obtain new measurements
that we'll define as Racc(1), Racc(2) , Racc(3) and so on. We'll also issue new estimates at each time intervals
Rest(1), Rest(2), Rest(3) and so on.
Suppose we're at step n. We have two known sets of values that we'd like to use:
Rest(n-1) – our previous estimate, with Rest(0) = Racc(0)
Racc(n) – our current accelerometer measurement
Before we can calculate Rest(n) , let's introduce a new measured value, that we can obtain from our gyroscope
and a previous estimate.
We'll call it Rgyro , and it is also a vector consisting of 3 components:
Rgyro = [RxGyro,RyGyro,RzGyro]
We'll calculate this vector one component at a time. We'll start with RxGyro.

剩余56页未读,继续阅读
2011-12-30 上传
102 浏览量
2023-03-26 上传
2024-10-09 上传
2023-07-12 上传
2024-07-30 上传
2023-09-11 上传
2023-05-13 上传

MicMind
- 粉丝: 122
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
