HoroPCA:双曲空间中基于horospherical投影的主成分分析
版权申诉
171 浏览量
更新于2024-07-06
收藏 1.08MB PDF 举报
HoroPCA: Hyperbolic Dimensionality Reduction via Horospherical Projections是一篇发表在计算机科学领域的论文,它探讨了如何将主成分分析(PCA)应用于超曲面数据。传统的PCA在欧几里得空间中非常有效,但随着超曲率几何在机器学习和数据挖掘中的应用逐渐增多,研究者们开始探索如何在非欧几里得环境中如双曲空间进行类似的降维方法。
论文的主要贡献在于对PCA的三个关键元素进行了超曲面化。首先,他们提出了一个针对超曲面方向的参数化方法,这在传统的PCA中是基于欧几里得向量的。其次,他们定义了一种在超曲面上保持原始数据信息的投影方式,这涉及到对horospheres(双曲球面)的处理,这些结构在双曲几何中具有独特的性质。最后,他们引入了一个优化目标,即最大化投影解释的超曲面方差,这是与欧几里得空间中的方差相似的概念,但在双曲空间中具有不同的数学含义。
HoroPCA的优势在于它理论上更好地保留了原始数据的内在信息,特别是距离结构,相比于之前的PCA在超曲面上的直接应用。这是因为双曲空间的几何特性使得距离和角度关系不同于欧几里得空间,HoroPCA能够更精确地捕捉这种特性。此外,通过horospherical projections,HoroPCA能够在不损失太多信息的情况下,显著减少数据的维数,这对于处理高维、密集和稀疏的双曲数据集具有实际价值。
论文的作者来自斯坦福大学,他们在计算机科学、计算和数学工程以及数学系工作,表明这项研究结合了理论基础和实践应用。HoroPCA为超曲面数据的分析提供了一种新颖且有效的降维工具,对于理解和处理双曲空间中的复杂数据集有着重要的意义。在未来的研究中,这种方法可能会推动更多领域,如社交网络分析、自然语言处理等,采用双曲几何来进行优化和模型构建。
O
y
x
p
γ
y
0
x
0
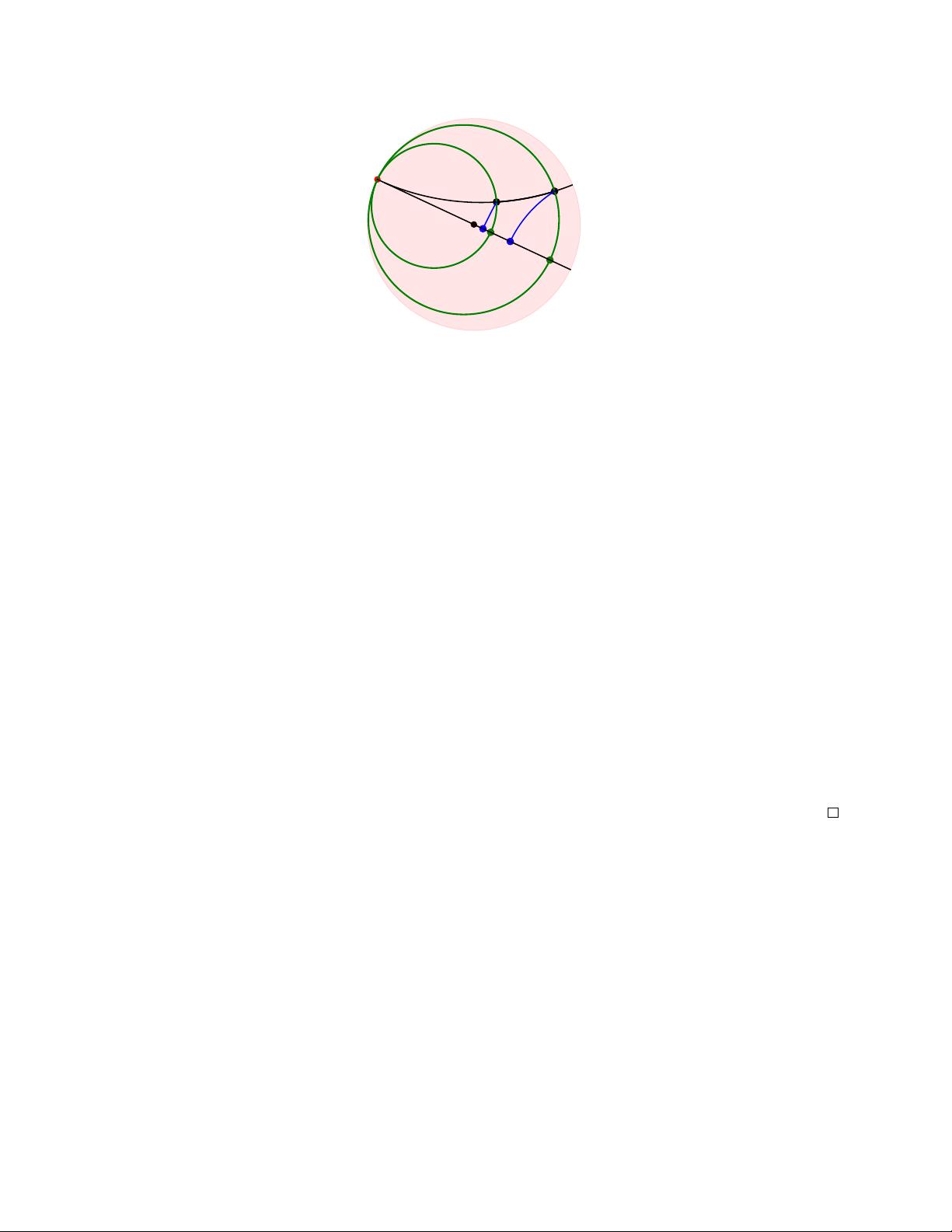
Figure 3:
x
0
, y
0
are horospherical (green) projections of
x, y
. Proposition 3.4 shows
d
H
(x
0
, y
0
) = d
H
(x, y)
. The distance
between the two geodesic (blue) projections is smaller.
3.2.1 Projecting onto K = 1 Directions
For
K = 1
, we have one ideal point
p
and base point
b
, and the geodesic hull
GH(b, p)
is just a geodesic
γ
. Our goal is
to map every x ∈ H
d
to a point π
H
b,p
(x) on γ that has the same Busemann coordinate in the direction of p:
B
p
(x) = B
p
(π
H
b,p
(x)).
Since level sets of
B
p
(x)
are horospheres centered at
p
, the above equation simply says that
π
H
b,p
(x)
belongs to the
horosphere S(p, x) centered at p and passing through x. Thus, we define:
π
H
b,p
(x)
:
= γ ∩ S(p, x). (3)
Another important property that
π
H
b,p
(·)
shares with orthogonal projections in Euclidean spaces is that it preserves
distances along a direction – lengths of geodesic segments that point to p are preserved after projection (Fig. 3):
Proposition 3.4. For any x ∈ H
d
, if y ∈ GH(x, p) then:
d
H
(π
H
b,p
(x), π
H
b,p
(y)) = d
H
(x, y).
Proof.
This follows from the remark in Section 2.2 about horospheres: every geodesic going through
p
is orthogonal to
every horosphere centered at
p
, and every orthogonal geodesic segment connecting concentric horospheres has the same
length (Fig. 2). In this case, the segments from
x
to
y
and from
π
H
b,p
(x)
to
π
H
b,p
(y)
are two such segments, connecting
S(p, x) and S(p, y).
3.2.2 Projecting onto K > 1 Directions
We now generalize the above construction to projections onto higher-dimensional submanifolds. We describe the main
ideas here; Appendix A contains more details, including an illustration in the case K = 2 (Fig. 5).
Fix a base point
b ∈ H
d
and
K > 1
ideal points
{p
1
, . . . , p
K
}
. We want to define a map from
H
d
to
M
:
=
GH(b, p
1
, . . . , p
K
) that preserves the Busemann coordinates in the directions of p
1
, . . . , p
K
, i.e.:
B
p
j
(x) = B
p
j
π
H
b,p
1
,...,p
K
(x)
for every j = 1, . . . , K.
As before, the idea is to take the intersection with the horospheres centered at p
j
’s and passing through x:
π
H
b,p
1
,...,p
K
: H
d
→ M
x 7→ M ∩ S(p
1
, x) ∩ · · · ∩ S(p
K
, x).
6

剩余30页未读,继续阅读
2022-07-15 上传
2021-09-30 上传
2022-09-23 上传
2010-10-01 上传
2021-04-07 上传
2010-10-27 上传
2021-05-28 上传
2021-09-30 上传
2021-05-22 上传


易小侠
- 粉丝: 6589
- 资源: 9万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
