A&A proofs: manuscript no. yolo_sdc1_paper
Target boxes Raw pred. boxes Current best pred. Boxes to remove Final pred. boxes
(a) (b) (c) (d)
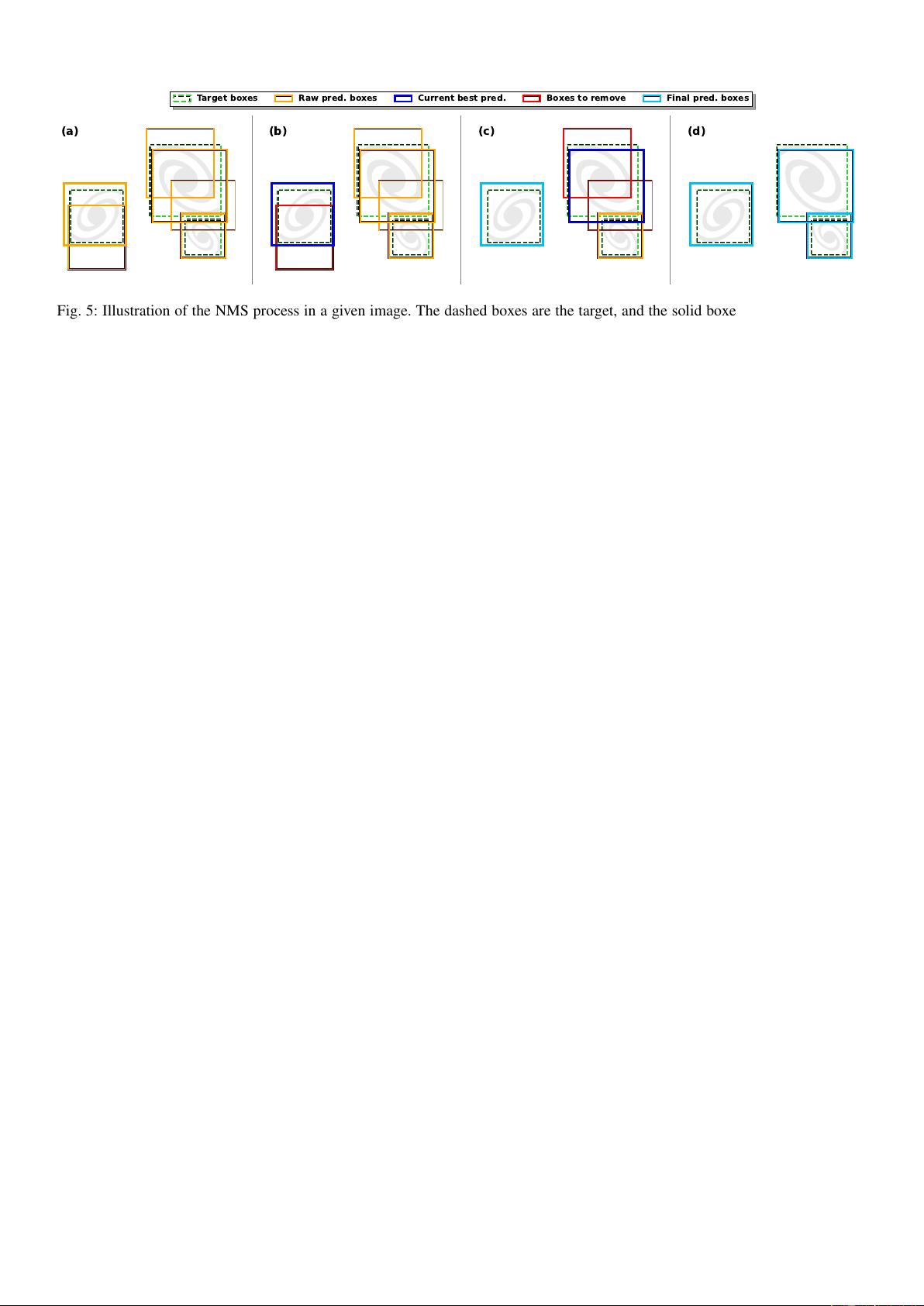
Fig. 5: Illustration of the NMS process in a given image. The dashed boxes are the target, and the solid boxes are the predictions.
The line widths of the boxes are scaled on their respective objectness score. The colors indicate the state of the box in the NMS
process at different steps. Frame (a) represents the targets and the raw network predictions that remain after the objectness filtering.
Frames (b) and (c) represent two successive steps of the NMS process with a different best current box. Frame (d) represents the
remaining boxes after completion of the NMS.
2.8. Prediction filtering and non-maximum suppression
We expect a properly trained detector to order its predictions by
quality based on the predicted objectness score for each detec-
tion unit. The raw detector output is always a static list of boxes
of size
D
g
w
, g
h
, N
b
×(6 + N
c
+ N
p
)
E
regardless of the input con-
tent. Consequently, the predicted boxes must be filtered based on
their objectness score to remove those that are unlikely to repre-
sent an object. By design, the number of actually detectable ob-
jects in the image should be low compared to the total number of
detection units in the grid. Therefore, most of the predicted boxes
belong to the background type with a low objectness score.
While the continuous objectness score is the best direct rep-
resentation of the detector’s inner workings, it is incompatible
with some final metric that needs a list of considered "good" de-
tections. Visualizing the predicted boxes also requires filtering
to preserve only the plausible detection. In such cases, an object-
ness threshold can be used to remove low-confidence detections.
This is usually done on a validation or test dataset not used for
training but for which the targets are known. The threshold can
be optimized to maximize a detection metric on this test dataset.
The main difficulty is that all detection units have fitted
their objectness independently. Due to the fully convolutional
structure of the network, a given detection unit represents the
same objectness fitting over the full grid, meaning that the same
threshold can be used. On the contrary, the predicted objectness
between two independent detection units is not comparable as
it depends on the type and frequency of targets associated with
each of them at training time. The classical solution is to fit an
individual objectness threshold for each of them. However, it
considers that predictions from different detection units are in-
dependent, which is not true for most applications. Still, fitting
a per-detection-unit objectness threshold removes the vast ma-
jority of false positives. To achieve the best results, the object-
ness regimes must be homogenized between the different detec-
tion units from the start by adjusting the individual λ
b
void
factors
(Sect. 2.5). While this is mainly an empirical and iterative pro-
cess, the main principle is to balance the ratio between detection
and background cases based on how the objects from the training
sample are expected to distribute over the detection units.
With most false positives removed, there can still be multi-
ple high-objectness predictions that represent the same object.
To preserve only the best-detected box for each object, we use a
classical post-processing step called non-maximum suppression
(NMS, Felzenszwalb et al. 2010; Girshick et al. 2013). It con-
sists of an iterative search for the box with the highest objectness
score in the image to remove all the overlapping predicted boxes.
To consider that there is an overlap, the two boxes must verify
fIoU > L
fIoU
NMS
with the fIoU being computed between the two
predicted boxes. All boxes with a lower objectness score than
the highest-scoring box are removed, and the best box is added
to a static prediction list. This process is repeated until no boxes
are left in the raw-prediction list. It is illustrated in Fig. 5.
The NMS is done regardless of what detection unit generated
the predicted boxes, demonstrating that they are not independent
as they can remove each other based on their respective object-
ness. This is one of the main reasons to force all detection units to
have similar objectness distributions. The detection quality can
only be evaluated after the NMS, so searching for the best λ
b
void
factors is dependent on the L
fIoU
NMS
and respectively.
3. Dataset description and network training
In this section, we present the main aspects of the SDC1 data
along with the expected products and the associated metrics. A
complete description of the SDC1 challenge and its data prod-
ucts can be found in Bonaldi et al. (2021), while the under-
lying T-RECS simulation is detailed in (Bonaldi et al. 2019).
We also present the pre-processing of the data to construct our
training sample. From this, we describe our best-performing
network architecture and specify the corresponding setup and
hyper-parameters for our YOLO-CIANNA detector.
3.1. Sub-challenge definition
The SDC1 is a source detection and characterization task in sim-
ulated SKA-like data products (Sect. 1) that comprises nine 4GB
images (three frequencies, with three integration times each) of
the same field. The SDC1 is only modestly challenging regard-
ing data volume, especially compared to the SDC2 with its 1TB
data cube. Still, it represents significant challenges for detec-
tion methods in many other aspects. All the images have the
same size of 32768 square pixels. As the frequency increases,
the angular resolution improves while the field of view reduces.
Therefore, images at different frequencies only partially over-
lap, meaning that the problem to solve varies with the position
in the field. In addition, the number of detectable sources varies
significantly with the integration time and frequency (Table 2 in
Article number, page 8 of 40

 我的内容管理
展开
我的内容管理
展开







