柔索驱动并联机器人模型样机研究与实验
需积分: 10 99 浏览量
更新于2024-08-12
收藏 1.02MB PDF 举报
"一种新型柔索驱动并联机器人的模型样机 (2002年)"
本文主要介绍了一种创新的柔索驱动并联机器人,该机器人由刘杰、宁柯军和赵明扬等人在2002年提出并研发。这个机器人机构利用张紧的柔索作为驱动力,通过运动学、动力学分析以及工作空间和轨迹规划的研究,设计并制造出了模型样机。此外,研究人员还开发了专门的机器人语言,以控制样机执行预设任务。
首先,柔索驱动的并联机器人以其独特的结构特点,如高刚度、高承载能力、高精度和优良的动力学特性,相比传统的串联机器人有着显著优势。这种新型机构在20世纪90年代后期开始受到广泛研究,其中S. Kawamura提出的FALCON-7柔索驱动并联机器人引领了这一领域的潮流。随后,其他学者也提出了一些不同构型的柔索驱动并联机器人,例如NIST ROBOCRANE和CABLEV。
该文章详细阐述了新型三自由度柔索并联机器人的机构设计,其三个移动副a、b、c的延长线在一点P交汇,形成了一个独特的运动平台。通过对机器人进行运动学分析,可以确定其运动规律和关节速度、位置之间的关系。动力学分析则涉及了机器人的受力情况和动态行为,这对于理解和优化机器人的运动性能至关重要。
工作空间分析是机器人设计中的重要环节,它定义了机器人能够到达的所有可能位置和姿态。研究人员对新型柔索并联机器人的工作空间进行了计算和评估,以确保其能满足预期应用的需求。轨迹规划则是为了使机器人能够在工作空间内按照预定路径精确地移动。
为了控制模型样机完成特定任务,研究人员开发了一套机器人语言,这使得机器人的运动指令可以通过编程实现。实验结果显示,这种新型柔索驱动并联机器人在执行任务时表现出良好的可行性,适合应用于轻型机床等设备。然而,在一定速度范围内,机器人会出现明显的振动和噪声问题,这会影响其性能和稳定性。因此,抑制振动成为提升机器人性能的关键挑战。
这项研究展示了柔索驱动并联机器人在设计、建模和实际应用方面的潜力,同时指出了未来需要解决的关键技术问题,即振动控制。该研究成果为柔索驱动并联机器人领域提供了有价值的理论依据和技术参考,推动了机器人技术的发展。
收稿日期
基金项目 国家自然科学基金资助项目
作者简介 屯刘 杰 男 辽宁沈阳人 东北大学教授 博士生导师 赵明扬 男 江苏扬州人 中国科学院沈阳自动
化研究所研究员 博士生导师
年 月
第卷第期
东 北 大 学 学 报 自 然 科 学 版
Journal of Northeastern University Natural Science
Oct
Vol No
文章编号
一 种 新 型 柔 索 驱 动 并 联 机 器 人 的 模 型 样 机
刘 杰
宁柯军
赵明扬
东北大学 机械工程与自动化学院 辽宁 沈阳 中国科学院 沈阳自动化研究所 辽宁 沈阳
摘 要 提出一种新型并联机器人机构 利用张紧柔索驱动该并联机器人
通过运动学和动
力学分析 工作空间分析 轨迹规划 误差分析 设计并制作了模型样机本体 驱动与控制模块 开
发了机器人语言 控制模型样机完成指定动作
实验结果表明 这种新型并联机器人是可行的 适
用于轻型机床等设备
该机器人在某一速度范围内工作时 会产生较明显的振动 并伴有噪声 因
此要提高机器人的性能还必须设法抑制其振动
关 键 词 并联机器人 柔索驱动 机器人语言 工作空间
中图分类号 T P 文献标识码 A
并联机器人具有刚度大 承载能力强 精度高
动力学特性好等许多串联机器人所没有的优点
世纪 年代以来 并联式机器人引起广泛关注 成
为机器人技术新的热点
年 日本学者
S Kawamura 等在国际机器人与自动化学会上提出
使用柔索驱动的并联机器人 FALCON 引起了国
际学者的广泛关注
之后相继有一些学者提出了几
种不同机构形式的柔索驱动并联机器人 如 NIST
ROBOCRANE CABLEV 等
本文提出一种新型并
联机器人机构 利用柔索驱动该并联机器人 对这
种新型柔索并联机器人进行了系统的研究 开发出
了一台模型样机系统
实验表明该新型柔索驱动并
联机器人具有较高的实用价值
机构组成
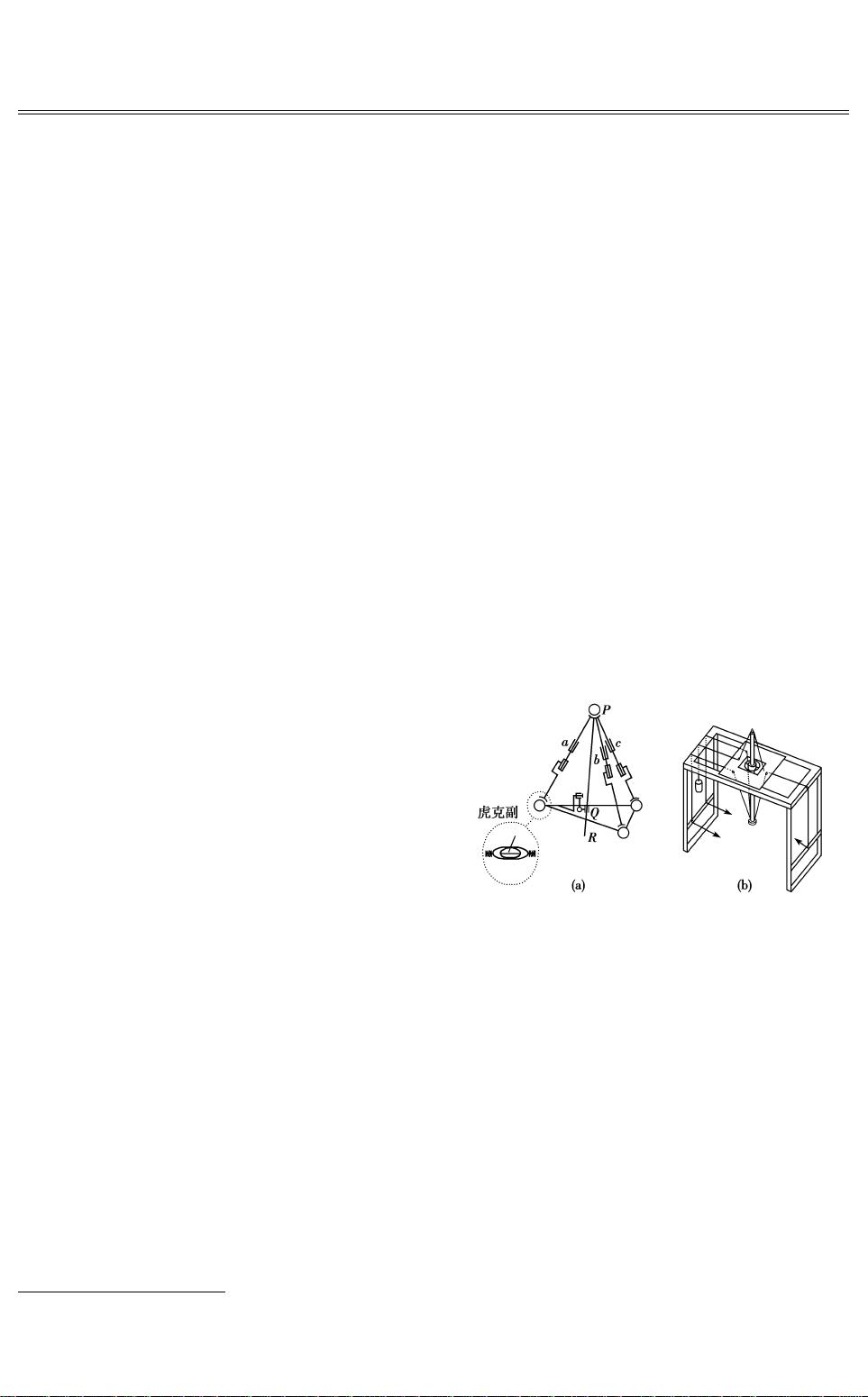
新型三自由度柔索并联机器人机构如图 a
所示 个移动副 a b c 的延长线汇交于一点 P
各自与杆轴 PQ 通过虎克副连接 它们的另一端
分别连接于 个转动副 再连接至固定于平台上
的 个虎克副
直杆 PR 通过 Q 处的虎克副穿过
平台 可称此处为虎克
移动副
由 一 般 形 式 闭 环 空 间 机 构 的 自 由 度
Kutzbach Grubler 公式可以证明这种空间构型的
自由度为
由这种空间构型可知 当 a b c 长度一定时
P 点位置确定 末端执行器接口 R 位置随之确定
当控制移动副 a b c 的伸长时 杆上任一点即在
空间掠过一段轨迹
因为机器人机械手臂一般具有
个自由度 其他的自由度由机器人腕部机构补
充 所以这种三自由度并联机器人机构可以用作多
自由度机器人的操作臂
图 1 三自由度柔索并联机器人机构简图
Fig 1 3 DOF wire driven parallel robot machine sketch
柔索驱动
柔索钢丝绳在张紧后具有刚性 从某种角
度说可以实现运动副的功能
一根柔索相当于两
套虎克副及一个转动副但当柔索绕自身轴线转
角过大时 还应计入一个回转弹簧
这里利用
根柔索代替图 a 中除 Q 点虎克移动副外其余
所有的运动副来实现这种新型并联机器人 其结
构如图 b 所示
操作杆一端连接有 根驱动柔
索 通过上平台板及架体上的 个固定滑轮绕到
架体底部 由 台步进电机驱动的卷扬机驱动
第
根柔索为张紧柔索 一端固定于上平台板 绕过
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-14 上传
2021-08-14 上传
2021-05-17 上传
2021-05-08 上传
2021-08-14 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38562392
- 粉丝: 4
- 资源: 917
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
