变臂电液负载模拟器与控制策略优化
版权申诉
147 浏览量
更新于2024-06-19
收藏 3.4MB PDF 举报
变臂长电液负载模拟器及其控制策略研究是一篇针对工程硕士学位论文,主要探讨了如何提升电液负载模拟器在地面实验中的精度和性能。传统的电液负载模拟器在模拟不同环境下的力矩载荷谱时,易受到舵机系统自主运动导致的强烈位置扰动,这会导致加载力中存在多余力,从而影响加载的准确性。作者针对这一问题,创新性地设计了一种变臂长电液负载模拟器。
该新型模拟器的改进之处在于将加载施力机构和舵机受力机构通过可调节支点的摇臂杠杆连接,摇臂杠杆两端分别铰接,通过调整支点位置来削弱舵机系统的强制位移干扰。这种设计旨在从结构原理层面减少加载过程中的多余力,提高加载精度。
论文还涉及到控制器的设计与优化。采用了粒子群算法(PSO)和模糊PID的复合控制策略,这两种先进的控制技术有助于增强系统的动态响应和稳定性。通过MATLAB软件进行理论分析和建模,作者对变臂长电液负载模拟器的数学模型进行了详细构建,以便于后续的仿真分析。
作者首先阐述了模拟器的结构组成和工作原理,通过理论分析确定摇臂杠杆的最佳支点位置,为后续仿真分析奠定了基础。接着,对舵机系统和加载系统的开环频率特性进行了深入分析,以及在传统PID控制器下的时域仿真,进一步揭示了系统的动态特性。为了实现更真实的仿真环境,论文还提及了与AMESim软件的联合仿真,这将帮助验证控制策略的有效性和整个系统的综合性能。
这篇论文不仅关注技术原理的创新,还强调了实际应用中的控制策略优化,展示了作者对电液负载模拟器技术的深入理解和实践能力。通过MATLAB的仿真结果,可以预期论文将提供一套有效的解决方案,以提升电液负载模拟器在航空航天等领域的实验精度和控制效果。
哈尔滨理工大学工学硕士学位论文
-5-
连接结构或在加载系统中增加特定的补偿环节来抑制多余力。下面将介绍三种
常见的结构补偿方式。
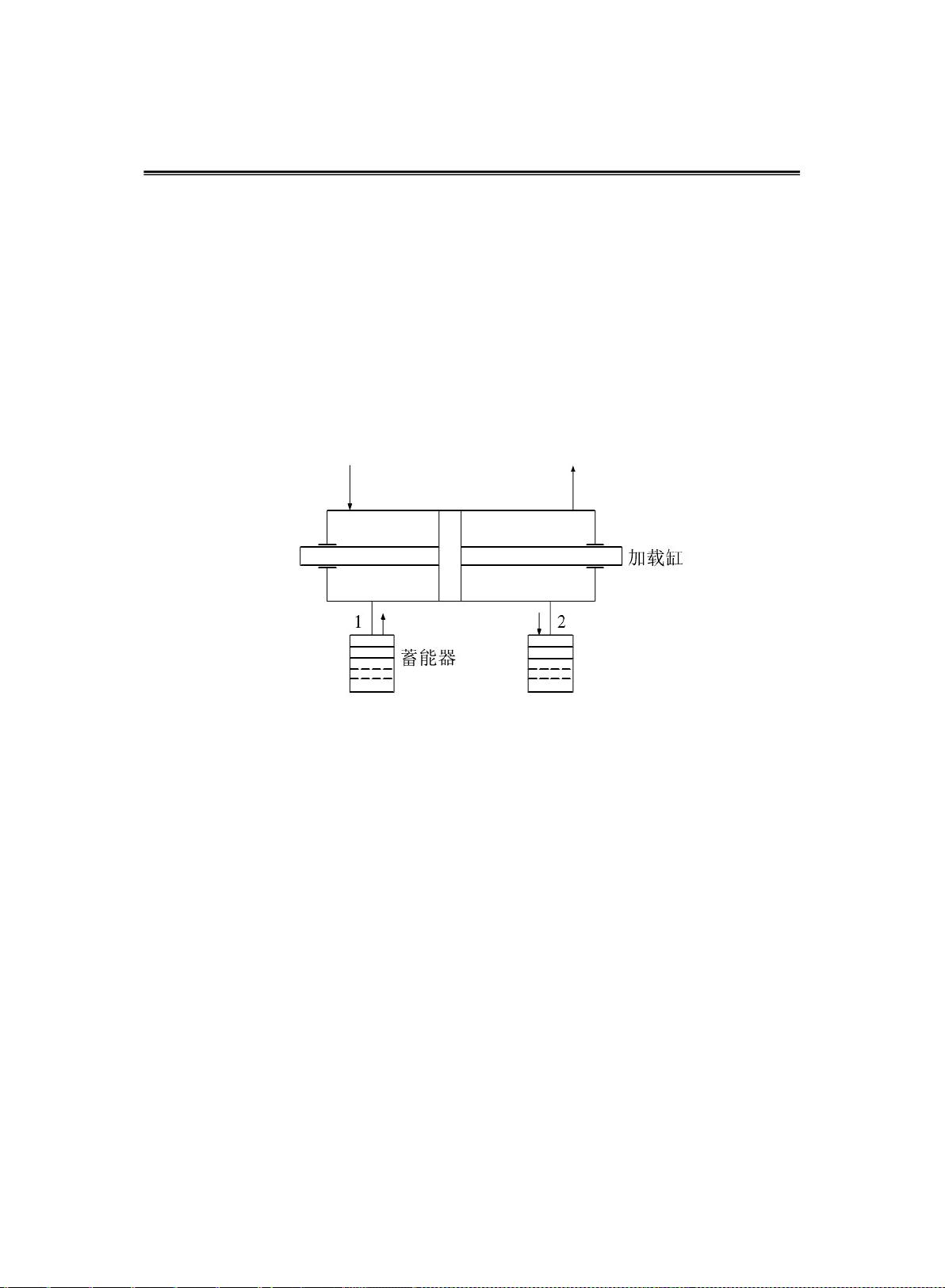
(1)蓄能器矫正方法
蓄能器校正方法的原理是在加载缸两腔各加入一个蓄能器,从而调节加载
缸两腔油压。当舵机系统的自主运动给加载系统两腔带来强迫流量时,可以通
过蓄能器释放或者补偿这部分强迫流量,抑制系统多余力,其工作原理如图 1-
1 所示。上海交通大学郭秦阳等人对该方法进行了深入的研究
[18]
。但是,加入蓄
能器后会使加载缸等效体积系数减小,从而影响系统频域特性,降低系统响应
速度。
图 1-1 蓄能器矫正方法工作原理图
Fig. 1-1 Working principle diagram of accumulator correction method
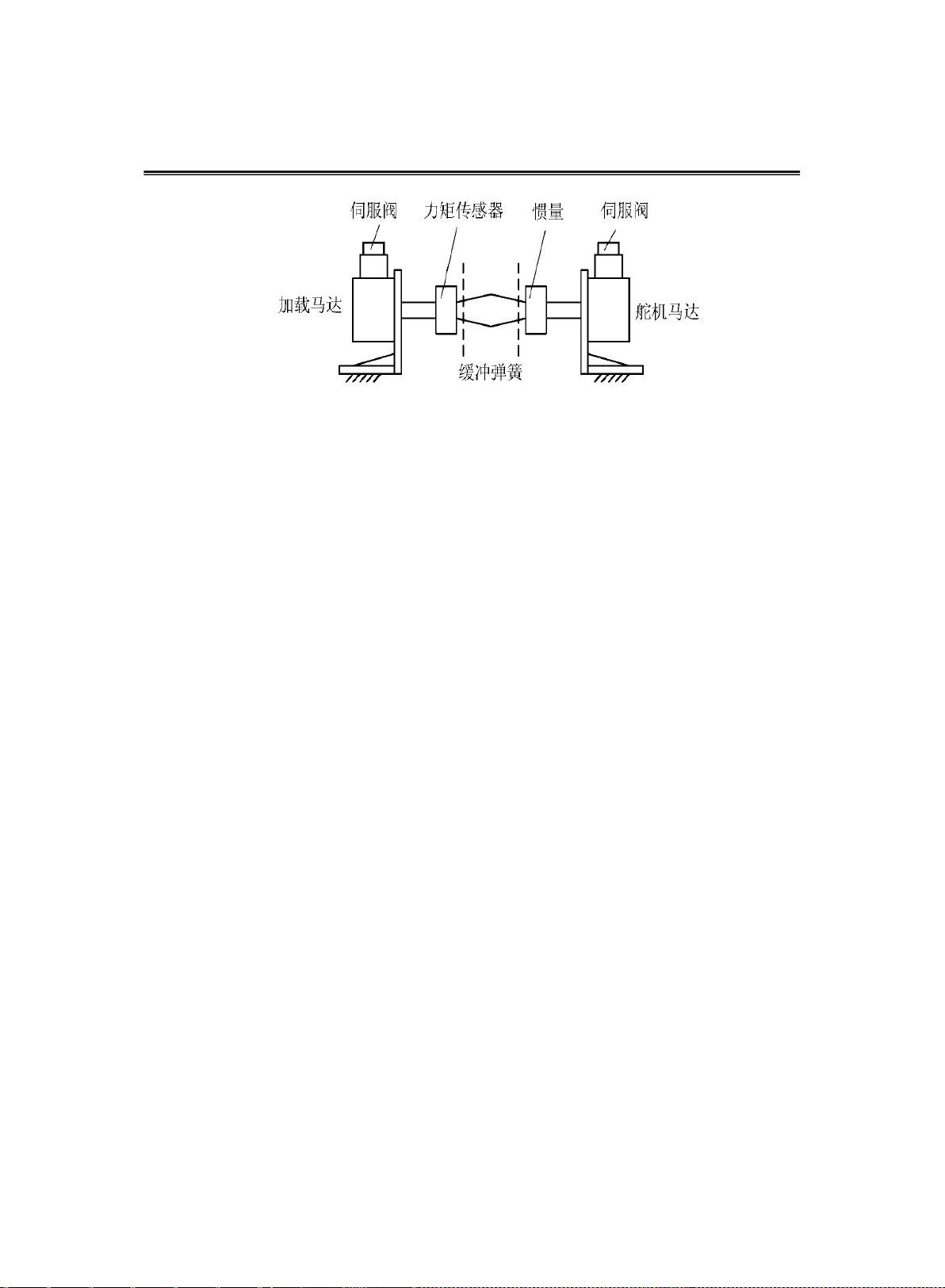
(2)缓冲弹簧校正方法
缓冲弹簧校正方法的工作原理如图 1-2 所示,是在电液负载模拟器舵机系
统和加载系统的连接机构中增加弹性缓冲环节,当系统正常工作时起到缓冲作
用,达到抑制系统内部多余力的目的
[19]
。Bo Zhang 等人为了提高用于测试导弹
舵机的负载模拟器的性能,提出了一种基于扭转弹簧的机械伺服负载模拟器设
计方案,最后通过实验验证了其能够有效地提高加载平台的精度
[20]
。但由于弹
簧的刚度值为常量,为满足不同加载梯度实验要求,必须更换弹簧刚度重新试
验,严重影响试验连续性
[21]
。中国民航大学刘晓林、曹政等人提出一种变刚度
螺旋缓冲弹簧作为电液负载模拟器连接部分的缓冲机构,达到抑制多余力的目
的
[22]
。该缓冲弹簧选用橡胶材质且其内有金属丝,可以实现不同加载梯度下的
变刚度加载,但其同样存在使加载系统加载力变小和滞后性问题。

剩余74页未读,继续阅读
2021-09-26 上传
2021-07-08 上传
2021-09-30 上传
2021-05-15 上传
2021-07-08 上传
2021-06-14 上传
2021-08-29 上传
2021-07-21 上传


xox_761617
- 粉丝: 29
- 资源: 7802
 我的内容管理
展开
我的内容管理
展开







最新资源
- mean-tutorial:MEAN Stack教程Markdown
- WPF的ValidationAttribute数据验证
- VC++ 显示隐藏窗体中的指定控件
- features_importance:带有表格数据的关于ML模型的可解释性的笔记本
- 电子功用-在电视画中画上显示监控视频的系统及其方法
- esbuild-node-modules
- VC++在MFC程序窗口中实现全屏显示切换
- simple_adonis_api:只是一个简单的阿多尼斯API
- hashcode2021:源HashCode 2021
- AndroidSimpleTwitterAppV2:V2版本
- OCR:腾讯云OCR文字识别
- Flunt.Extensions.AspNet
- react-weather-app:使用React,Material-UI和Redux的示例应用程序根据位置显示当前天气
- BCMenu 自绘菜单的另一个VC++版本源代码
- spring-framework-projects:我自己使用java框架、javascript框架和数据库技术开发的项目
- Python库 | zhulong3-5.0.8.zip
