SPI接口TP驱动开发与平台兼容性
需积分: 5 52 浏览量
更新于2024-08-05
收藏 289KB DOCX 举报
"该文档是关于TP驱动开发的设计文档,主要涵盖了SPI接口的TP驱动,包括SPI模式、驱动兼容性、模组兼容性以及在不同平台(如高通和展锐)上的TP驱动框架,并列举了一些经典的案例分析,用于解决在开发过程中可能遇到的问题。"
在TP驱动开发中,SPI接口的使用是为了节省成本,因为这种方案无需额外的Flash芯片来存储固件。在开机或亮屏时,固件需要通过SPI接口重新下载到TP控制器。SPI接口有多种工作模式,由CPOL(Clock Polarity)和CPHA(Clock Phase)决定,常见的工作模式为Mode 0和Mode 3。
驱动兼容性方面,SPI驱动与I2C驱动创建设备节点的方式不同。在SPI中,设备节点是基于Chip Select (CS)序号创建的,但实际硬件可能只有一个CS引脚。为了解决这个问题,通常会在设备树(dtsi)中使用dummycs创建节点,然后在驱动代码中设定spi_dev的chip_select为实际的CS值。
模组兼容性处理主要是针对同型号IC但不同供应商的模组。通过解析LK传递的commandline,比较lcd_name来确定使用哪个供应商的模组。高通平台提供了完善的机制,可以使用`check_dt()`函数来实现自动检测,而展锐平台的功能则相对较弱,可能需要手动设置全局变量来识别模组。
在具体的平台框架部分,文档介绍了MTK(MediaTek)和展锐平台的TP驱动架构。虽然具体内容未详述,但通常会涉及到驱动初始化、中断处理、数据传输等方面。
案例分析部分列举了多个常见问题,如创建SPI设备失败、在高通平台上的dt检查失败、某些特定模组在休眠后的唤醒问题,以及驱动更新导致的机器死机等。这些问题的分析有助于开发者理解并解决实际开发中可能遇到的问题,例如SPI时序的调整、驱动配置的优化等。
这份文档为TP驱动开发提供了一份详细的指南,涵盖了从基本的SPI接口工作原理,到不同平台的驱动实现,再到问题排查,对于从事触摸屏驱动开发的工程师来说是一份宝贵的参考资料。
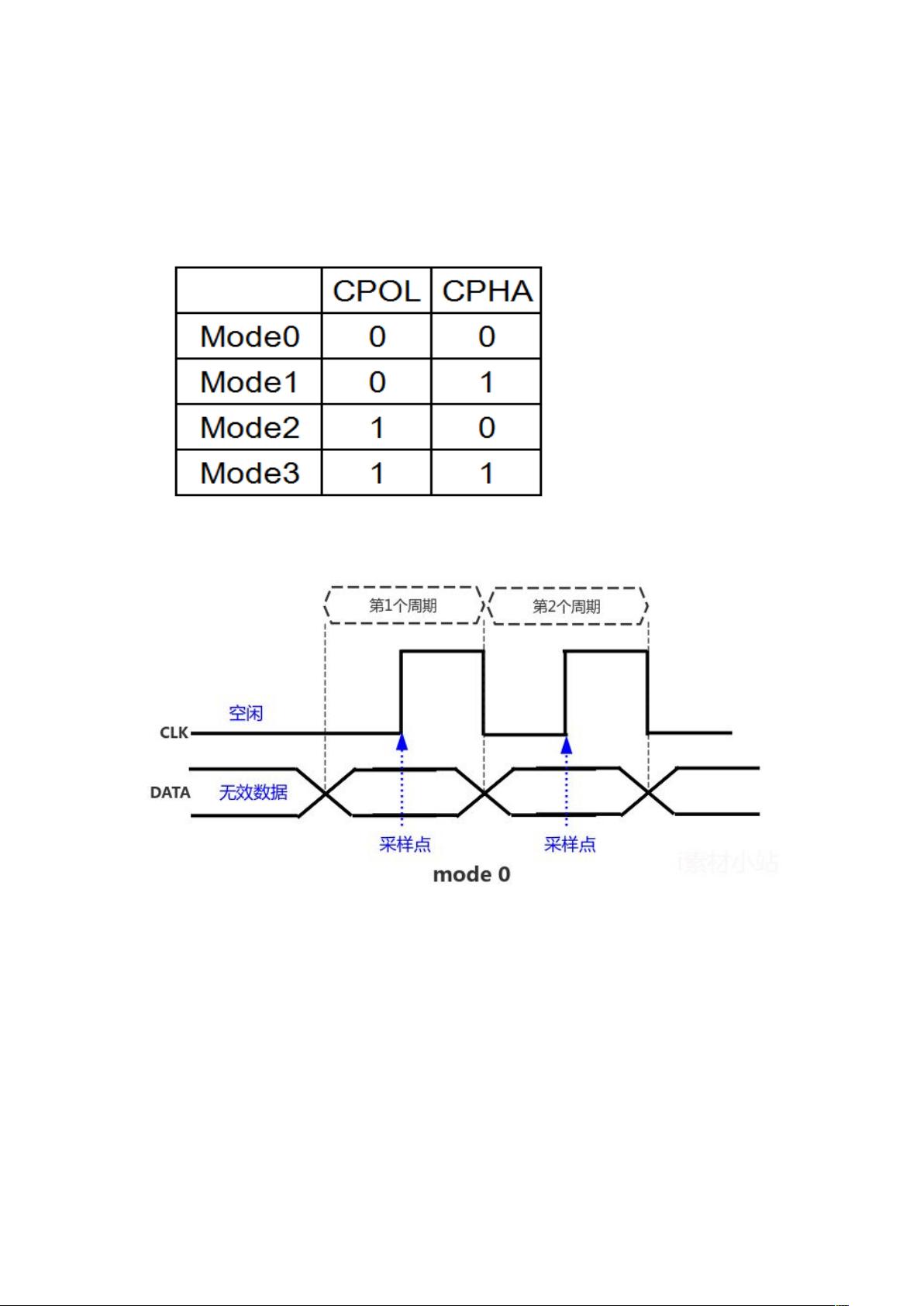
1.1 SPI Mode
CPOL: Clock Polarity,空闲时 clock pin 的电平,低或者高。
CPHA: Clock Phase, 采样边沿,在 clock 的第一个边沿采样或者第二个边沿采样。
常用 Mode0 或者 Mode3。
剩余12页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-03-22 上传
2021-03-27 上传
2021-02-09 上传
2021-05-28 上传
2021-10-02 上传
2016-07-26 上传

zz_nj
- 粉丝: 334
- 资源: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
