三维凸性分析:三次平面多项式系统闭轨的凸性探讨(1998)
需积分: 5 130 浏览量
更新于2024-08-11
收藏 159KB PDF 举报
本文主要探讨了平面多项式系统确定的闭曲线在实际工程应用中的凸性问题,特别是针对次数不超过三次的多项式系统。在齿轮设计等场景中,确保闭合曲线的凸性对于确保机械结构的稳定性和性能至关重要。论文首先给出了凸集和凸曲线的定义,强调了闭合曲线的凸性是通过判断任意两点间连线是否完全位于区域内部来确定的。
引理部分表明,对于非凸的闭合集合Ω,总能找到一条从Ω内部出发的射线,至少与Ω的边界曲线相交于三个点。这个引理为后续的分析提供了关键推论。作者利用这个引理证明了一个重要定理:当多项式的阶数n小于等于2时,系统(1)定义的所有闭轨都是凸的。他们采用了反证法,假设存在非凸闭轨,然后通过平移坐标和极坐标变换,将问题简化到一个从原点出发的射线与闭轨的交点个数,进而得出矛盾。
当n=2时,由于多项式的低次特性,闭轨的形状易于控制,不容易出现非凸的情况。然而,对于更高次的多项式系统(n>2),情况可能会变得复杂,可能需要更复杂的理论分析和计算方法来确保闭轨的凸性。这篇论文提供了一个基础框架,对于理解如何处理这类几何约束问题具有重要意义,但并未深入讨论n>2时的具体方法。
这篇文章在凸性理论和多项式系统动态系统之间架起了一座桥梁,对于从事齿轮设计、控制系统或者其他依赖于闭曲线凸性的领域的工程师和技术人员来说,它提供了一种理论指导,帮助他们在实践中判断和优化设计。同时,这也为数学和计算机科学领域的理论研究者提供了实际问题的背景和挑战,促进了理论与实际应用的结合。
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
关于平面多项式系统的闭轨的凸性
①
①
李艳梅
3
杨多立
(
云南大学数学系 , 昆明 , 650091
)
(
云南民族学院学报 , 昆明 , 650031
)
摘要 在一些实际工作中 , 例如齿轮的设计 , 常需要考虑平面多项式系统确定的
闭曲线的凸性. 现对次数不高于三次的平面多项式系统的闭轨的凸性进行了讨
论 , 并得到一些结论.
关键词 平面多项式系统 , 闭轨 , 凸性
定义 1
Ω
今 R
2
称为凸集 ,是指 V x
1
, x
2
∈
Ω
, V
λ
∈[0 ,1 ] ,
(
1 -
λ)
x
1
+
λ
x
2
∈A 或
∨ x
1
, x
2
∈A , [ x
1
, x
2
] 今 A . 换句话说 ,设
Ω
为 xoy 平面上的有界闭区域 ,如果连接
Ω
上任
意两点的线段全部在
Ω
内 ,则称
Ω
为凸集.
定义 2 设
Ω
是由闭曲线 l 所围成的区域 ,如果
Ω
是凸集 ,则称 l 为凸曲线 .
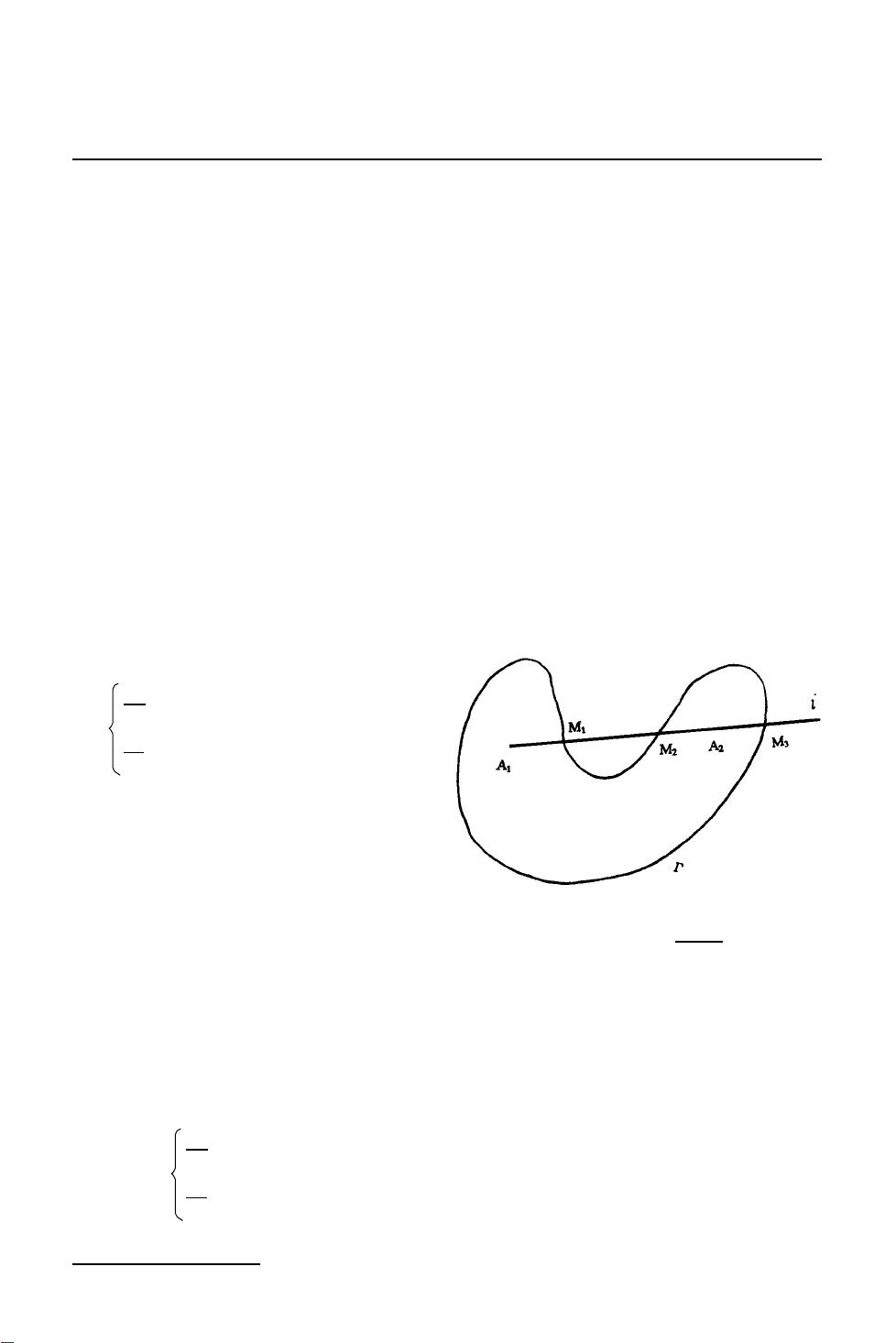
图 1 非凸闭集
Ω
考虑下面的平面系统 :
d x
d t
= P
n
(
x , y
)
d y
d t
= Q
n
(
x , y
)
(
1
)
其中 p
n
及 Q
n
都是 n 次多项式.
为了讨论系统
(
1
)
所定义的闭曲线的凸
凹性 , 我们先证明以下引理 :
引理 对于平面上的非凸闭集
Ω
, 存在
起点在
Ω
内的射线 l 至少交
Ω
的边界闭曲线
Г于三点.
证明 因为
Ω
非凸 , 则存在两点 A
1
、A
2
∈
Ω
,使连接 A
1
、A
2
的线段 A
1
A
2
不完全在
Ω
内 ,如图 1 所示. 以 A
1
为起点 ,过 A
2
作射线 l ,可见该射线至少交 Г于三点 M
1
, M
2
和 M
3
.
由上面的引理我们可以证明以下定理 :
定理 当 n ≤2 时 ,系统
(
1
)
的所有闭轨都是凸的.
证明 先对 n = 2 进行证明 ,用反证法. 假设 n = 2 时系统
(
1
)
存在一条非凸闭轨 Г
0
,
由上面的引理得知 ,存在起点在闭轨
Γ
0
内部 A
1
处且至少与 Г
0
交于三个点 M
1
、M
2
、M
3
的
射线 l. 作平移变换 ,将坐标原点平移到 A
1
,于是 l 就为从原点出发的射线. 设平移坐标后系
统
(
1
)
变为 :
d x
d t
= X
2
(
x , y
)
d y
d t
= Y
2
(
x , y
)
(
2
)
—12—
第 7 卷第 1 期 云 南 民 族 学 院 学 报 Vol. 7 No. 1
1998 年 4 月 Journal of Yunnan Institute of the Nationalities Apr. 1998
①
1997 - 07 - 02 收稿 3 原楚雄师专教师 , 现为云南大学研究生
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
116 浏览量
2021-05-31 上传
2021-06-12 上传
2021-05-15 上传
2021-05-10 上传
2021-05-21 上传
2021-05-28 上传

weixin_38628626
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java实现推箱子小程序技术解析
- Hopp Doc Gen CLI:打造HTTPS API文档利器
- 掌握Pentaho Kettle解决方案与代码实践
- 教育机器人大赛51组代码展示自主算法
- 初学者指南:Android拨号器应用开发教程
- 必胜客美食宣传广告的精致FLASH源码解析
- 全技术领域资源覆盖的在线食品商城购物网站源码
- 一键式FTP部署Flutter Web应用工具发布
- macOS下安装nVidia驱动的简易教程
- EGOTableViewPullRefresh: GitHub热门下拉刷新Demo介绍
- MMM-ModuleScheduler模块:MagicMirror的显示与通知调度工具
- 哈工大单片机课程上机实验代码完整版
- 1000W逆变器PCB与原理图设计制作教程
- DIV+CSS3打造的炫彩照片墙与动画效果
- 计算机网络基础与应用:微课版实训教程
- gvim73_46:最新GVIM编辑器的发布与应用
