MADYMO 6.2.2入门教程:多体运动模拟
"MADYMO 622 入门训练资料,包含6个练习,专注于MADYMO软件的基础操作,特别是针对中文用户的稀缺资源。文档由TNO Automotive China/TNOMADYMO BV发布,适用于MADYMO 6.2.2版本。"
MADYMO是一款广泛应用于汽车碰撞安全分析的多体动力学仿真软件,它能够精确模拟复杂的机械系统,尤其是车辆碰撞时的各种动态效应。这份训练资料旨在帮助用户掌握MADYMO的基础功能和使用方法。
在"Exercise 2 - Bouncing Ball"中,用户通过创建一个球体在平面弹跳的模型来学习MADYMO的关键概念。首先,你需要了解如何使用XMADgic建立XML文件,这是MADYMO中的输入文件格式,用于定义模型的结构和行为。在这个例子中,球的质量为0.1kg,惯量为0.40.40.4000,这包括了球的转动惯量。
模型的构建涉及到几个关键步骤:
1. **多体(Multi-body)**:球体被建模为一个多体对象,允许模拟其动态行为。
2. **铰(Joints)**:定义球体与环境(在此案例中是地面)之间的连接,如铰接,允许球体自由移动。
3. **初始位置/速度**:设置球体初始的位置和速度,这里球以-1m/s的速度向下运动。
4. **GROUP**:用于组织和管理模型中的不同组件,便于应用负载或约束。
5. **LOAD**:定义作用在物体上的力,如重力,使得球体下落。
6. **CONTACT**:设置物体间的接触条件,当球体与地面碰撞时,需要计算接触力。
在XMADgic中,用户需进行以下操作:
- **RUNID**:给模型设定一个简短的描述,便于识别。
- **CONTROL_ANALYSIS.TIME**:设定模拟的时间参数,例如模拟时间范围(0.0s到2.0s)和时间步长(0.001s),积分方法选用EULER方法。
- **CONTROL_OUTPUT**:定义输出参数,如输出运动学响应,可能是一个以.kn3为后缀的动画文件,每隔一定时间间隔(如上述未给出的具体数值)保存一次结果。
通过这个练习,用户不仅能熟悉XMADgic的界面和操作流程,还能理解多体动力学模拟的基本原理,并掌握如何在MADYMO中处理碰撞和接触问题。这个过程对进行更复杂的汽车碰撞模拟至关重要,因为这些基础概念和技术是所有MADYMO分析的核心。
TNO Automotive China Page 7 of 38
Exercise 3
Multi-body Exercise: Football
目标: 在 MADYMO 6.2.2 中创建几何模型、铰链以及可视化表
面、理解各个坐标系、铰的方向、铰的约束等概念。
Files required: ex3_initial_football.xml
File created: kick.xml
参考文件: football_solved.xml
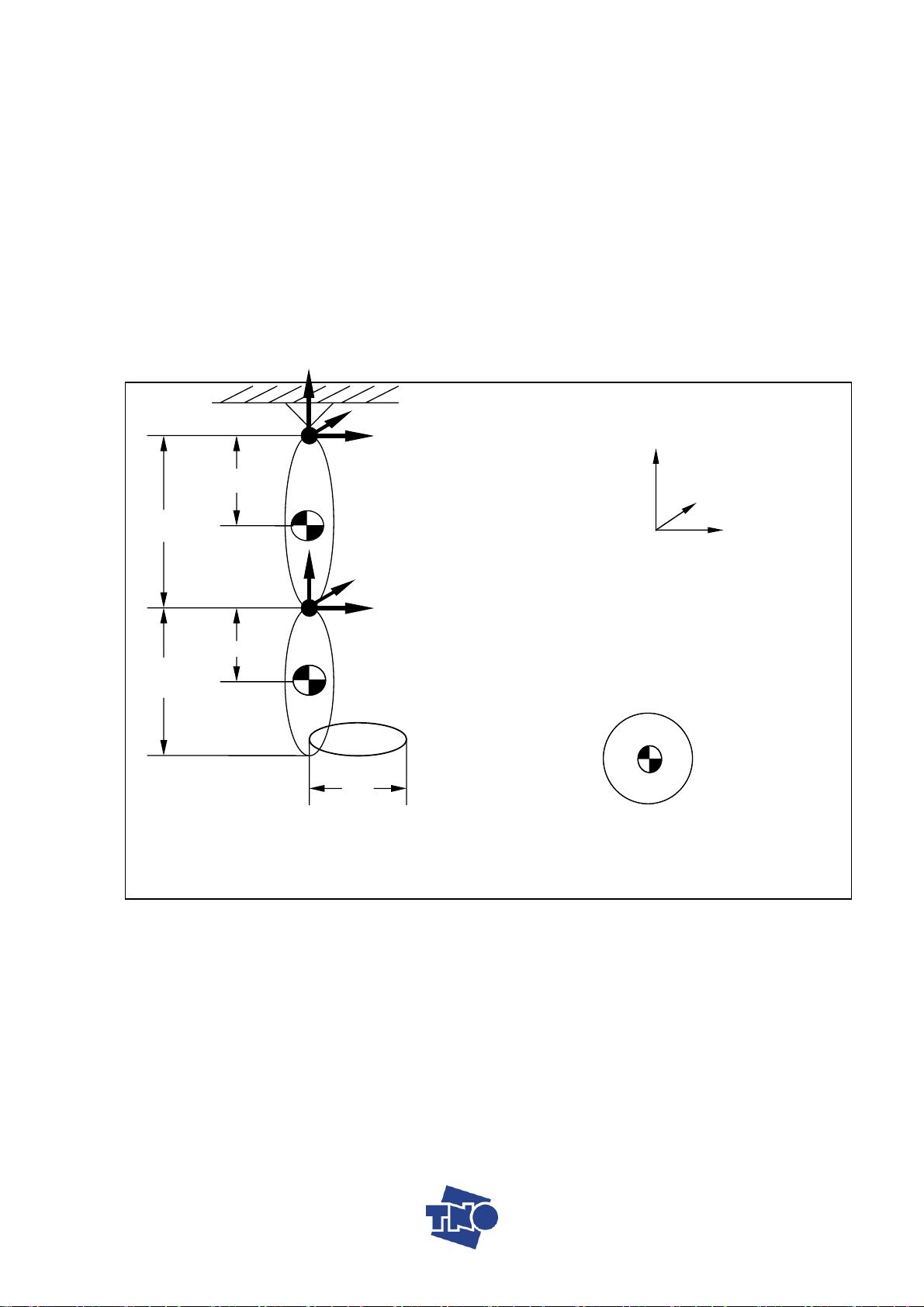
Fig.3.1 腿踢球模型示意图
Part A: 模型建立
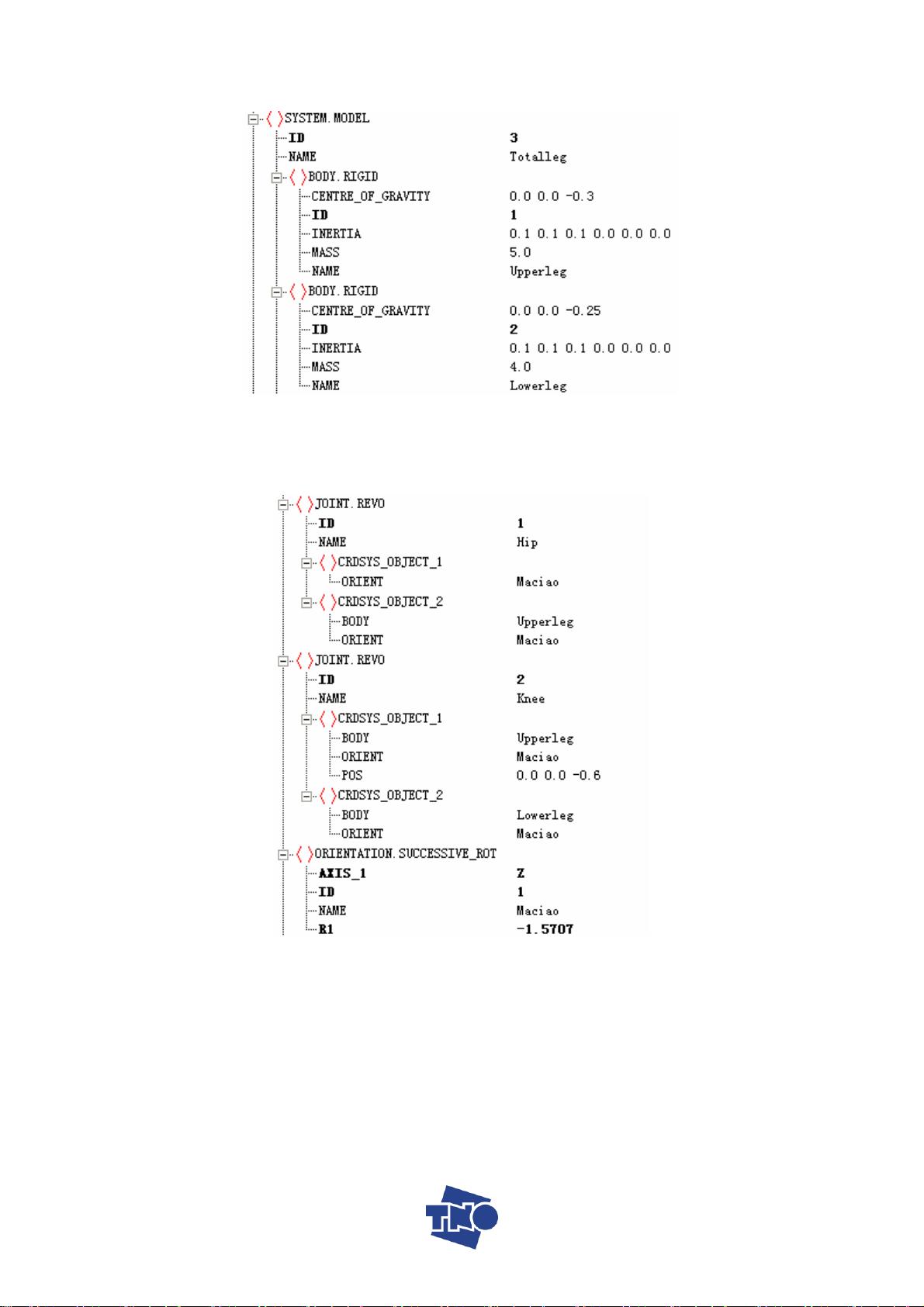
打开目录下的 ex3_initial_football.xml 作为起始文件。腿部模型包括两个刚体(小腿与
脚作为一个体)。通过一个 JOINT.REVO 将刚体 1 与 REFERENCE (INERTIAL) SPACE 相
连。再通过一个 JOINT.REVO 将刚体 2 与刚体 1 相连。
建好的初始文件
ex3_initial_football.xml 是把参考空间的原点放在大腿的转动铰上,
其三个坐标轴的方向如 Fig.3.1 所示。
在建立腿的系统模型时,首先需要确定铰的位置,从而确定体的坐标系,然后确定体
的质心相对位置。在 Fig.3.1 中铰所示位置就是每个刚体的局部坐标系位置,所以体的质心
位置也就确定了。
System 2: Ball
0.6
0.3
0.2
5kg
Ixx=Iyy=Izz=0.1 kg*m
2
4kg
Ixx=Iyy=Izz=0.1 kg*m
2
Body 1
Body 2
0.5
System 3: Leg
0.3
z
x
y
System 1: Reference Space
剩余37页未读,继续阅读
118 浏览量
196 浏览量
2022-05-22 上传
127 浏览量
120 浏览量

ghg2006ghg
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
