Matlab离散控制系统仿真:从命令行到Simulink
版权申诉
"实验二-基于Matlab的离散控制系统仿真"
在本次实验中,主要探讨了如何使用Matlab对离散控制系统进行仿真,包括通过命令行和Simulink工具箱两种方式。实验目的是掌握Matlab在离散系统仿真中的应用,理解离散系统与连续系统之间的转换,并分析不同参数对系统性能的影响。
首先,实验介绍了离散控制系统的理论基础。一阶系统闭环传递函数是G(s) = 3/(s + 3),将其转换为离散系统脉冲传递函数是关键步骤。这通常通过Z变换或利用MATLAB的`c2d`函数完成。离散系统的零极点分布、根轨迹、波特图、奈奎斯特曲线和尼科尔斯曲线等特性可通过仿真得到,并与连续系统进行对比,以了解离散化过程对系统动态特性的影响。
实验内容详细展示了二阶系统的离散化过程。给定的二阶系统传递函数为G(s) = 25/(s^2 + 4s + 25),在采样时间T = 1的情况下,转换为离散形式。MATLAB命令行被用来计算和绘制连续和离散系统的单位脉冲响应、单位阶跃响应、零极点分布、根轨迹、波特图、奈奎斯特曲线和尼科尔斯曲线。实验结果表明,离散化会改变系统的动态响应,如超调量和调整时间。
此外,使用Simulink工具箱建立了系统的模型,对不同输入信号(Step和Ramp)进行仿真,通过改变模型参数观察其影响。例如,输入信号的分子增大导致超调量增加和调整时间延长。这展示了离散化和参数变化如何影响系统的稳定性。
最后,实验还包括将已离散化的系统再次在Simulink中仿真,以验证离散化处理对Step和Ramp输入响应的影响。通过比较不同分子值(1和250)的仿真结果,可以深入理解离散化对系统性能的微妙改变。
实验报告部分应包含对以上所有仿真结果的详细分析,讨论离散化、参数变化和输入信号类型如何改变系统的响应特性,并总结实验中学到的关键概念和技术。这不仅加深了对离散控制系统理论的理解,也锻炼了使用MATLAB进行系统仿真的实践能力。
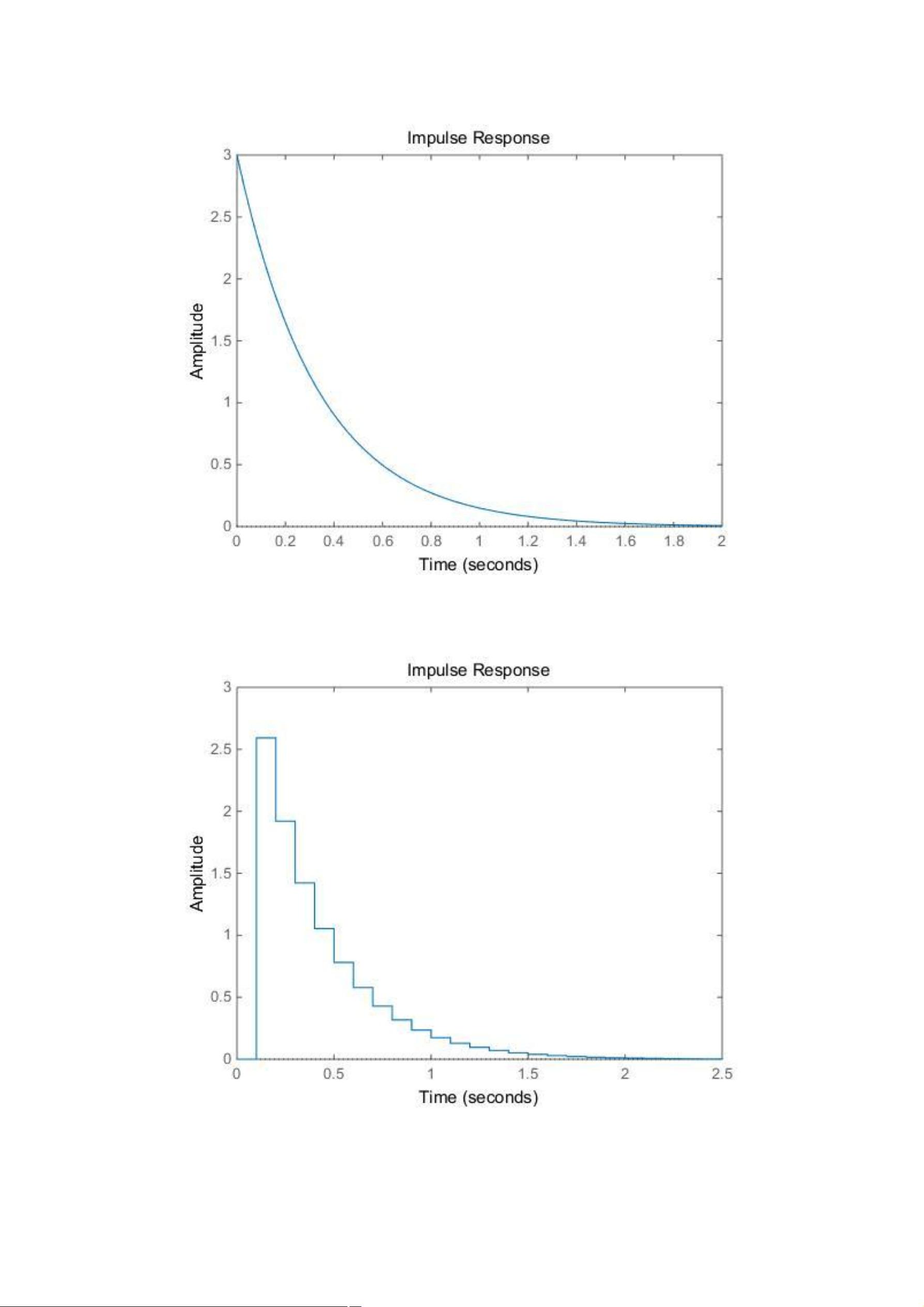
离散函数单位脉冲响应曲线:
连续函数单位阶跃响应:
5
剩余22页未读,继续阅读
3869 浏览量
点击了解资源详情
点击了解资源详情
133 浏览量
579 浏览量
108 浏览量
132 浏览量
2021-10-31 上传
2021-10-22 上传

hhappy0123456789
- 粉丝: 76
 我的内容管理
展开
我的内容管理
展开







最新资源
- 弯曲书面文字识别新技术研究
- 易语言实现CMD自禁技术及文件路径获取教程
- ECMS新插件:帝国内容管理系统批量栏目添加功能
- LitePager:实现新版网易云歌单广场的轻量级ViewPager
- 数字光照传感器BH1750FVI模块使用与原理探究
- Android Shared Preference的 prefs-droid 工具使用教程
- Font Awesome 4.2.0:图标字体库与CSS框架的完美结合
- 新型建筑无扩容式排水汇集器设计方案
- 赛元SC95F861X与PCF8563日历芯片的串口通信实现
- Gson 2.2.4版本发布,Java对象序列化利器
- Vue指令实现自动滚动到底部功能:vue-chat-scroll-alpha介绍
- 《Java核心编程》第九版官方英文PDF下载
- 实现Android跨进程通信的MPEventBus技术
- RecyclerView高效上拉加载下拉刷新实战
- 建筑工程BIM应用价值评估新方法研究
- Angular CRUD操作实战教程
