改进的最小总误差熵法:非高斯噪声下EIV系统参数估计的优化策略
140 浏览量
更新于2024-08-26
收藏 2.34MB PDF 举报
本文主要探讨了在误差-变量(Errors-in-Variables, EIV)系统或模型中,参数估计问题的优化方法。EIV系统假设输入数据和输出数据都受到噪声的影响,这使得传统的总最小二乘法(Total Least Squares, TLS)在处理非高斯噪声时表现受限,因为它依赖于平方误差的最小化,无法充分挖掘数据中的潜在信息。
在非高斯环境下,误差熵准则(Error Entropy Criterion, EEC)和基于误差熵的最小误差熵(Minimum Error Entropy, MEE)方法因其在利用数据信息方面的优势,已在先前的研究中崭露头角。然而,传统的MEE方法在估计过程中忽略了输入数据中的噪声成分,导致在应用于EIV系统时,可能导致性能下降,解决方案并非最优。
为了克服这一局限,本文提出了一种新的理论框架——总误差熵准则(Total Error Entropy Criterion, TEEC),以及基于此准则的最小总误差熵(Minimum Total Error Entropy, MTEE)方法。MTEE方法不仅考虑了噪声的存在,还针对输入数据进行了更全面的处理。作者还进行了详细的理论分析,包括局部稳定性研究,通过限制步长确保了算法的稳健性。
本文的核心贡献在于提供了一种新的参数估计策略,旨在更好地应对非高斯噪声环境下的EIV系统。通过仿真结果,MTEE方法证明了其在性能上的显著提升,尤其是在与TLS和传统MEE方法相比较时。当噪声是非高斯分布时,MTEE方法能够更有效地估计参数,从而实现更优的系统性能。
总结来说,这篇文章在参数估计领域引入了一个创新的策略,即最小总误差熵方法,以处理EIV系统中的复杂噪声情况,对于提高这类系统的鲁棒性和准确性具有重要的实际意义。
SHEN AND LI: MINIMUM TOTAL ERROR ENTROPY METHOD FOR PARAMETER ESTIMATION 4081
where is the error/perturbation at input (per-
turbs the measurements to fit the linear model) and
is a weighting vector with positive
entries. In [9], the authors show that the above optimization
problem can be efficiently solved by the singular value de-
composition (SVD) and based on the results of SVD, the
above optimization problem is proven to be equivalent to the
following minimization problem,
(6)
where
is a nonsingular weighting ma-
trix.
By defining
(7)
the above minimization problem (6) can be expressed as
(8)
By this method, we have written the cost function of LS (2)
and the cost function of TLS (8) in the same form. Because in
(7),
considers both the output error and the input error, and
also because it is used in the total least squares, we call it “total
error”. Comparing (8) with (2), we see that the LS minimizes the
sum of squared output error while the TLS method minimizes
the sum of squared total error in estimation.
In the TLS method, the designing of weighting coefficients
is quite application-specific. The latter coef-
ficients
weight the dimensions of the input error
, respectively, whose values depend on specific applications.
In the following of this paper, for the sake of simplicity, we set
all
to be equal (thus ), giving the dif-
ferent dimensions of input error the same weight. The algorithm
obtained in the following subsection can be easily extended to
cases that
are not equal, by using a weighting
matrix
. The first weighting coefficient weights the
output error. In reality, if the input noise intensity
and the
output noise intensity
are known as prior knowledge, the
coefficient
can be set as [3], [29], to avoid the
negative effect brought by the inequality of input and output
noise intensity. If the exact values of noise intensity are not
known and the input noise intensity is assumed to be comparable
to output noise intensity, we can roughly set
(Intuitively,
it is a natural choice in such a case. More detailed reasons for
this setting are providedintheSectionIII).
The difference in the meaning of cost function (8) from
that of cost function (2) can be interpreted explicitly from the
perspective of geometry. Essentially, the estimation problem is
tantamount to finding a
-dimensional hyperplane ,defined
by
to fit the -dimensional data points under specific op-
timization goals [9], [29]. The optimization goals are different
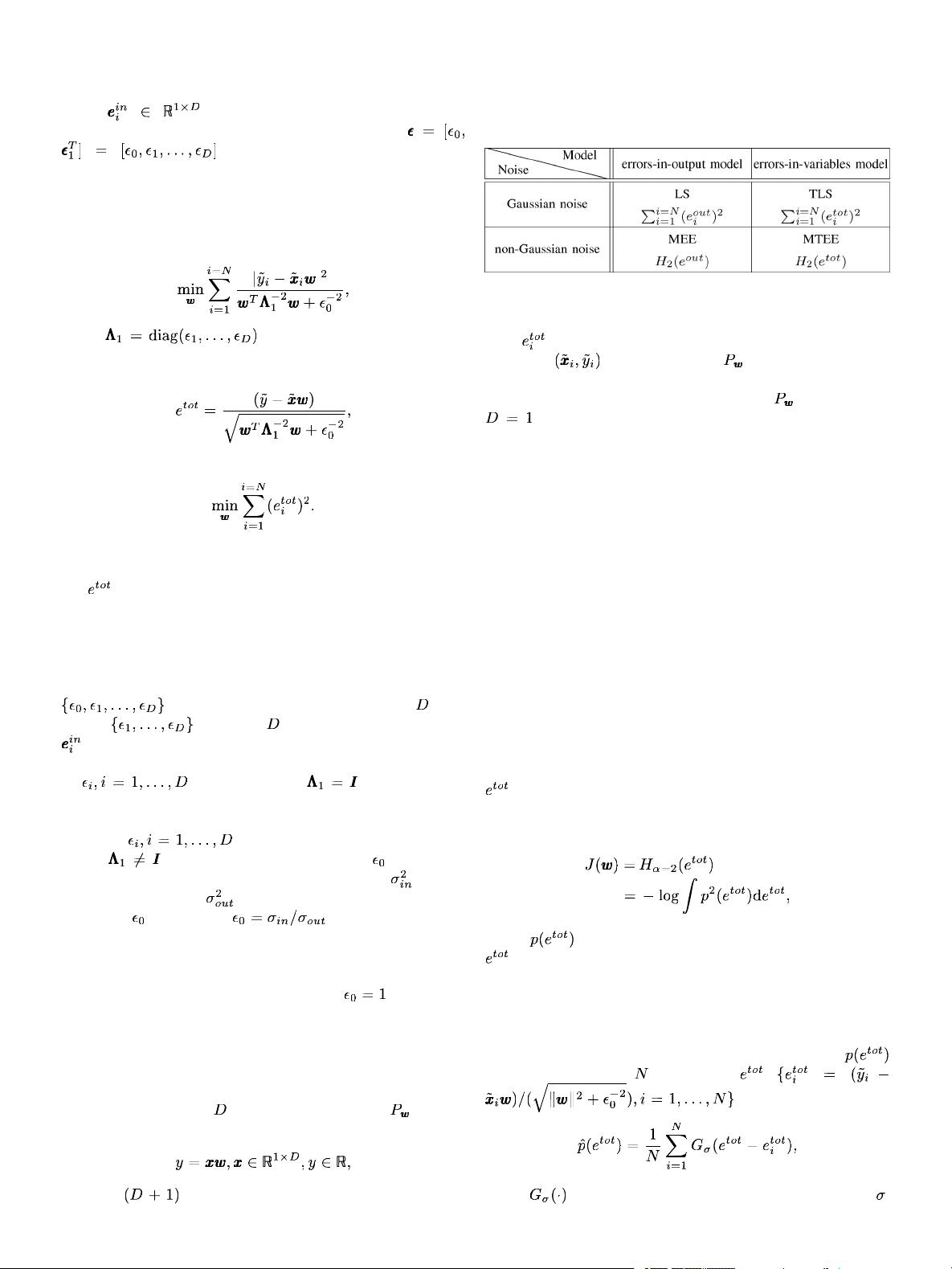
TABLE I
AC
OMPARISON OF THE OBJECTIVE FUNCTIONS OF THE FOUR METHODS.
for different estimation methods. In the TLS method, the total
error
is actually the (signed) perpendicular distance from
data point
to the hyperplane . In contrast, in the LS
method, the output error can be viewed as the vertical distances
from the data points to a fitting straight line
,inthecaseof
[9], [11], [29]. So, in other words, the two estimation
methods employ two different distance measures in the design
of cost functions.
We note that, like the LS method, the TLS method is based
on the second-order statistics of the total error. Thus it is no
longer efficient when the total error is non-Gaussian according
to the reasons discussed above. Considering the comparison
results between the LS method and the MEE method, we think
that in EIV system, when both (A.1)and(A.2) are invalid,
methods combining total error and information-theoretic mea-
sure may outperform the traditional TLS method. So, in this
work, we develop information-theoretic estimation algorithms
which considers the existence of measurement noise in the
input signal.
Algorithm Formula ti on
Given the above discussions, under the errors-in-variables
model, we propose to estimate the system parameters by
minimizing the quadratic Renyi's entropy of the total error
, and we call the proposed algorithm the minimum total
error entropy (MTEE) method. Specifically, the cost function
is given by
(9)
where
is the probability distribution function (pdf) of
. In the Table I, we can explicitly see the contribution of
the MTEE method by comparing its cost function with those of
the other three methods. To some extent, it can be viewed as a
complement to the existing LS method, TLS method and MEE
method.
Using the Parzen window method, the pdf
can be estimated by samples of ,
:
(10)
where
is a Gaussian kernel function with kernel size .
Substituting (10) into (9), we can obtain a convenient evaluation
剩余11页未读,继续阅读
2021-04-26 上传
2023-08-25 上传
2021-03-24 上传
2021-08-08 上传
2021-04-14 上传
2021-03-15 上传
2021-09-18 上传

weixin_38621630
- 粉丝: 3
- 资源: 913
 我的内容管理
展开
我的内容管理
展开







最新资源
- SMS1.0:实训第一周案例
- Advanced List Service for IRCnet ircd-开源
- custom-wordpress-theme
- alu.rar_VHDL/FPGA/Verilog_VHDL_
- DSTC6-端到端会话建模:DSTC6:端到端会话建模
- 长短链接实现.zip
- :link:您自己的URL缩短器-PHP开发
- Software-Quality:质量与测试实验室
- slurmpy:使用快速和肮脏的python提交作业以毁
- Commercial-Properties-in-India-Top-Commercial-Projects-in-Noida-:同样重要的是,在诺伊达(Noida)或大诺伊达(Greater Noida)的商业项目中要意识到,所有重要的业务部门也都具有知识。 诺伊达(Noida)和NCR的其他各个部分中,配备齐全的商业项目通常都设有办公室,例如高速升降机,Wi-Fi,气候控制系统,瓷砖甲板,CCTV,多面开口,照明,娱乐中心,综合设施,儿童游乐设施等。此外,承办地点应具有以下优点:广泛的车辆离开,安全性
- eleventy-plugin-embeddeverything:一个Eleventy插件,仅使用URL即可轻松将常用媒体格式嵌入帖子中
- bootstrap 图标引入
- 小清微博(原百度收藏夹)源代码
- Anagram Finder-开源
- vagrant-chef:一个带有所有必要的厨师食谱的流浪者安装,用于运行基本的cakephp应用程序
- public-information-map-template-js:ArcGIS Online映射模板,用于在地图上展示社交媒体以用于灾难响应和公共信息
