




直驱永磁风电机组LVRT参数整定与实测验证方法
PDF格式 | 1.89MB |
更新于2024-08-28
| 110 浏览量 | 举报
本文主要探讨了直驱永磁风电机组在面对低电压穿越(LVRT)时的模型参数整定方法及其实测验证。首先,作者强调了在电力系统动态特性分析中,精确的风电机组模型和参数至关重要,这关系到整个系统的稳定性和性能。他们回顾了美国电科院和WECC关于风电机组通用模型的发展历程,这些模型为电力系统仿真提供了标准化框架。
针对直驱永磁风电机组的特殊性,文章提出了一种新的参数整定策略。传统基于轨迹灵敏度的参数辨识方法由于参数的非线性特性,在处理这类复杂系统时可能存在局限。因此,作者创新性地结合参数调整与参数优化技术,通过计算各参数的轨迹灵敏度来确定LVRT模型的关键参数。这种方法旨在找到既能保证模型准确性又能应对实际运行中可能遇到的各种扰动场景的最佳参数组合。
作者以某直驱永磁风电机组为例,采用实际测量数据进行参数整定和模型验证。实验证明,这种方法不仅能够有效识别出关键参数,而且具有良好的适应性,能在各种扰动情况下保持模型的精度。此外,文中还进行了适应性分析,进一步证实了所提整定方法的实用性和有效性。
总结来说,这篇研究工作不仅提供了一种新的参数整定方法,而且还通过实测验证证明了其在实际风电机组中的应用价值。这对于提高直驱永磁风电机组在电网中的稳定性,特别是在低电压穿越条件下的性能,具有重要的理论和实践意义。
第 39 卷 第 4 期
2019 年 4 月
电 力 自 动 化 设 备
Electric Power Automation Equipment
Vol.39 No.4
Apr. 2019
直驱永磁风电机组 LVRT 模型参数的整定方法与实测验证
黄 桦
1ꎬ2
ꎬ潘学萍
2
ꎬ李佳伟
2
ꎬ袁小明
1
ꎬ鞠 平
2
(1. 华中科技大学 电气与电子工程学院ꎬ湖北 武汉 430074ꎻ2. 河海大学 能源与电气学院ꎬ江苏 南京 211100)
摘要:针对直驱永磁风电机组ꎬ提出低电压穿越( LVRT) 模型参数的整定方法ꎮ 基于直驱永磁风电机组的通
用模型结构ꎬ计算各参数的轨迹灵敏度ꎬ获得 LVRT 模型的关键参数ꎮ 指出由于参数的非线性特性ꎬ现有的
基于轨迹灵敏度的参数辨识方法难以适用ꎮ 为此ꎬ提出将参数调整与参数优化相结合的参数整定方法ꎮ 以
某直驱永磁风电机组为例ꎬ基于实测数据进行了参数整定及模型验证ꎬ并进行了其他扰动场景下的适应性分
析ꎬ结果验证了所提方法的可行性和有效性ꎮ
关键词:直驱永磁风电机组ꎻ低电压穿越ꎻ参数整定ꎻ实测验证ꎻ轨迹灵敏度ꎻ适应性分析ꎻ模型
中图分类号:TM 614 文献标识码:A DOI:10.16081 / j.issn.1006
-
6047.2019.04.023
0 引言
合适的风电机组模型及准确的参数是仿真分析
含高比例风力发电电力系统动态特性的基础
[1 ̄3]
ꎮ
早在 2009 年ꎬ美国电科院(EPRI)、美国西部电力协
调委员会 WECC(Western Electricity Coordinating Coun ̄
cil)建模工作组提出了 4 种类型的风电机组通用模
型结构ꎬ后经不同厂家的实测验证与模型改进ꎬ于
2014 年又提出了第二代风电机组的通用模型
[4 ̄7]
ꎬ
并将该通用模型应用到 PSS / E、PSLF 等电力系统仿
真平台
[8 ̄9]
ꎮ 文献[10 ̄11] 对 WECC 提出的风电机
组通用模型进行了讨论及适应性评述ꎮ 国内中国电
力科学研究院、河海大学等
[12 ̄13]
也在这一方面做了
有意义的工作ꎮ
收稿日期:2018
-
08
-
02ꎻ修回日期:2019
-
01
-
05
基金项目:新能源发电与智能电网“111”引智计划(B14022)
Project supported by the “ 111” Project of Renewable Energy
and Smart Grid(B14022)
风电机组的参数整定与模型验证是检验仿真
模型是否准确的前提ꎮ 文献[14] 从扰动的确定、观
测量的选择以及参数辨识方法的选择等因素出发ꎬ
给出了风电机组参数辨识的框架以及流程ꎮ 文献
[15]总结对比了各国实测、验证风电机组模型的做
法ꎮ 部分厂家的风电机组模型校核方法
[16 ̄17]
也值得
借鉴ꎬ如 ABB 公司以发电机出口处的电压跌落为激
励信号ꎬ根据实测数据验证直驱永磁风电机组的模
型参数
[18]
ꎻGE 公司通过在发电机出口处的电压施
加阶跃信号 / 投切风电场内的电容器组等手段施加
激励信号进行模型校核
[19]
ꎮ
上述风电机组的参数整定或模型验证都侧重于
连续参数ꎬ尚未有对导致风电机组非平滑动态特性
的参数进行整定的研究报道ꎮ 而从 WECC 公布的
直驱风电机组的模型结构可以看出:控制器中存在
限幅、死区环节ꎬ且在不同电压跌落程度下系统存在
动态切换等离散事件ꎮ 文献[20] 强调ꎬ双馈 / 直驱
风电机组本身为混杂系统ꎬ其非线性特性使得风电
机组的动态特性尤为复杂ꎮ
本文 针 对 直 驱 永 磁 风 电 机 组 在 低 电 压 穿 越
(LVRT)期间的逻辑控制模块各参数提出参数整定
方法ꎮ 由于 LVRT 期间的控制策略中存在的限幅、
死区等非线性参数可能导致风电机组的动态轨迹非
平滑ꎬ适用于辨识常规参数的轨迹灵敏度方法将不
再适用ꎮ 为此ꎬ本文采用启发式方法与优化方法相
结合的思路ꎬ对于导致风电机组非平滑动态的非线
性参数ꎬ先采用参数调整的方法获得其初始值ꎬ进一
步进行曲线拟合ꎬ从而获得参数结果ꎮ
1 LVRT 模型参数的灵敏度分析
WECC 推出的直驱永磁风电机组(Type 4) 通用
模型结构见附录中图 A1ꎬ其包括驱动系统(wtgt_a)、
转子侧控制环节(reec_a)、发电机以及网侧变流器
(regc_a) 和场 站 级控 制 ( repc _ a) 4 个模 块ꎮ 其 中
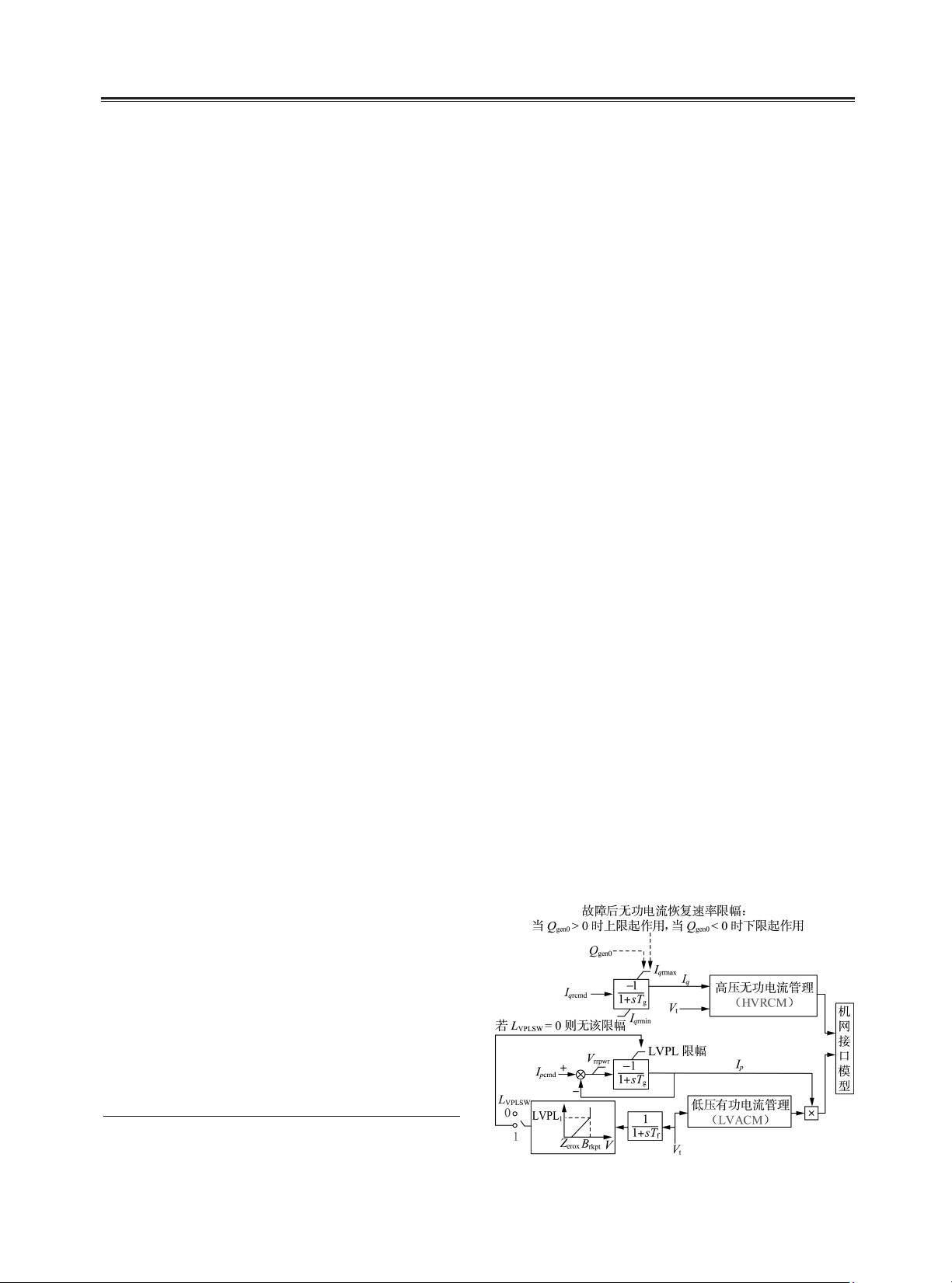
regc_a 和 reec_a 的模型结构分别见图 1 和图 2ꎬ各参
数定义见文献[8]ꎮ
图 1 regc_a 的模型结构
Fig.1 Model structure of regc_a
1.1 LVRT 期间风电机组的控制策略
从图 1、2 可见:风电机组的控制环节除了正常
下载后可阅读完整内容,剩余6页未读,立即下载
相关推荐


weixin_38631773
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开








最新资源
- 掌握Delphi:无畏跨平台开发的探索之路
- Seaborn绘图教程:打造炫彩Python数据可视化图表
- 摩根州立大学RACECAR V1项目:人工智能与自主性的结合
- 一招搞定Win7免驱摄像头驱动安装
- Pytorch实现Transformer:图像分类的像素与补丁级注意力配对
- DailyDoc: 利用Jetpack Compose打造高效率生产力应用
- 《星期五爷爷》绘本故事PPT模板下载
- 编程与计算概论2:Python实践与实验教学
- segmentThalamicNucleiGear:Python项目中的齿轮文件应用
- MiniFarms插件:我的世界迷你农场构建工具
- 《欧先生的大提琴》绘本故事PPT模板下载及使用指南
- Python游戏虚拟机实现教程与探索
- Java开发的国际象棋系统:chess-system-java
- pip-tools:掌握Python依赖管理的艺术
- BlueStacks资源分配机制与Python实现
- 固特伊迪:捕捉灵感的网络应用,组织激发,助力完成项目






















