多模态组合导航系统:里程计+地磁+GPS的高精度设计与仿真验证
67 浏览量
更新于2024-08-31
收藏 625KB PDF 举报
"基于里程计/地磁/GPS的导航系统设计是一种创新的解决方案,针对传统单一导航系统存在的精度受限和可靠性问题。在机器人技术中,精确的导航与定位至关重要,而不同的传感器如里程计(提供轮式运动信息,易累积误差)、GPS(提供全球定位,但信号易受干扰)和地磁传感器(依赖地球磁场,易受外部磁场影响)各自具有局限性。
设计的核心是构建一个组合导航系统,通过卡尔曼滤波器对这些传感器的数据进行融合和误差校正。卡尔曼滤波器是一种递归最小二乘算法,用于估计和减小噪声影响下的系统状态,从而提供最优的估计结果。这种方法能够有效降低导航误差,提高移动机器人在复杂环境中的定位精度。
当单一导航系统信号丢失或故障时,组合导航系统的优势就显现出来,因为其他传感器仍能提供部分定位信息,确保机器人在有限的信息下仍能维持较高的导航性能。例如,当GPS信号不稳定时,地磁和里程计数据可以作为补充,保持整体定位的稳定性。
仿真实验通过MATLAB进行,结果验证了这种组合导航系统的有效性。通过集成FPGA作为导航计算机,该系统能够在实际应用中展现出更高的可靠性和精度,这对于移动机器人在工业、医疗、搜索与救援等领域的高效运作至关重要。
此外,系统还采用了光电编码器来测量机器人位置和航向角,这提供了一种精确且实时的定位方法。通过光电编码器,机器人能够连续更新其运动状态,进一步增强了导航系统的实时性和准确性。
总结来说,这种基于里程计/地磁/GPS的组合导航系统设计是机器人技术领域的重要进步,它克服了单一导航方式的不足,显著提升了移动机器人在复杂环境中的导航性能,为机器人在多种应用场景中的自主导航提供了强有力的支持。"
基于里程计基于里程计/地磁地磁/GPS的导航系统设计的导航系统设计
导航是机器人技术中的核心问题。针对单一导航系统的不足,设计了一种基于里程计/地磁/GPS的移动机器人的
组合导航系统。通过建立各导航系统的误差模型,并对误差进行分析,利用卡尔曼滤波器对导航系统的误差进
行估计,得到系统误差的最优估计。最后利用间接法滤波输出对导航系统进行校正。通过MATLAB进行仿真实
验,证明该导航系统能够有效地降低导航误差,提高了移动机器人的导航定位精度,而且当某一导航系统接收
不到信号或者坏掉时,系统仍然可以保持高精度的导航。
摘要 摘要:导航是机器人技术中的核心问题。针对单一导航系统的不足,设计了一种基于
关键词 关键词:组合导航;卡尔曼滤波;移动机器人;里程计
0引言引言
移动机器人导航技术的关键在于导航与定位的信息检测和路径规划等多种传感器信息的融合。机器人只有通过自身的传感
器感知周围的环境信息和自身的位置、姿态,才能在有障碍物的环境中无碰撞地完成面向目标点的任务。目前广泛应用于移动
机器人的导航与定位信息检测的传感器有里程计、陀螺仪、GPS、地磁传感器、超声波传感器等[1]。
里程计是一种位置传感器,可以用来测量车轮的速度信息,从而计算出机器人的位置和姿态,但是存在累计误差;GPS
具有高精度、全球性、全天候等特点,但其信号容易受到干扰,常作为辅助导航系统;地磁传感器可以测出地球自生的磁场信
息,从而计算出机器人与地理北的夹角,但是它易受周围磁场影响。
由此可见,每一种导航系统都有自身的独特性和局限性,很难独立地去完成导航任务,因此本文设计了一种以FPGA为导
航计算机,基于里程计/地磁传感器/GPS的组合导航系统,实现移动机器人的导航定位,提高导航精度。
1移动机器人的导航定位移动机器人的导航定位
1.1光电编码器测量机器人位置及航向角光电编码器测量机器人位置及航向角
光电编码器又称光电码盘,是一种测量速度和位置的装置。假设光电码盘编码原盘上的光栅总数为N,电动机通过K倍的
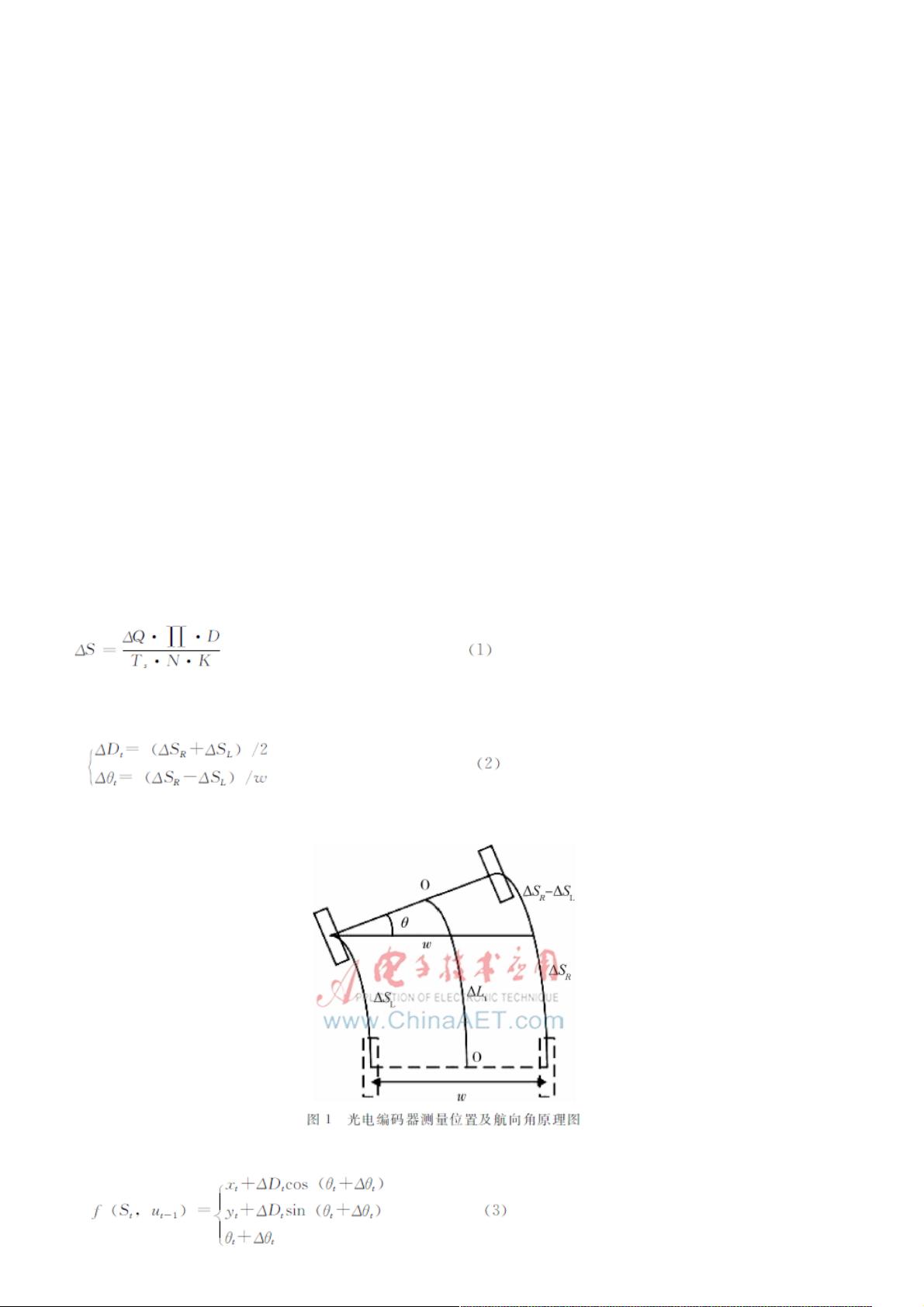
减速器驱动车轮,车轮的直径为D,在采样时间Ts内,光电码盘输出的脉冲增量为Q,则在单位采样时间内车轮的增量ΔS为:
假设左、右两个驱动轮之间的距离为w,单位采样时间内左、右两轮的位置增量分别为ΔSL和ΔSR,机器人从t-1时刻St
-1=(xt-1,yt-1,θt-1)运动到t时刻的St=(xt,yt,θt),则单位采样时间内位姿增量为:
光电编码器位置及测量航向角原理图如图1所示。
机器人在短时间内的运动可以近似看作是直线运动。直线模型具体描述如下:
下载后可阅读完整内容,剩余6页未读,立即下载
2021-09-08 上传
2024-10-27 上传
146 浏览量
192 浏览量
点击了解资源详情
点击了解资源详情
2024-10-27 上传

weixin_38715019
- 粉丝: 6
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高仿百思不得姐demo.zip
- 住宅楼户型设计CAD参考图纸图集(13)
- Java高效排序算法前五位
- 拖动滑块选择数字插件sider.jquery.js
- ClinicManagementSystem:为胸部诊所Borella开发基于Web的信息和管理系统。 提供改善胸部诊所信息收集和管理任务的方法
- 监控别人的行踪
- 互联网
- KeyListPerf.zip
- 网络商城B2C项目商业计划书
- rails_learnings
- 3D 曲线:本书第 7 章中描述的 3D 曲线示例:“CRC 标准曲线和曲面”-matlab开发
- Report-It-Android-Advanced:报告这是一个应用程序,允许其用户报告从垃圾到涂鸦和坑洼的各种问题。 该应用代表了Android高级课程的最终项目(面向程序员的Google Digital Workshop)
- Lojinha-de-lanche:Curso教授Macoratti
- 简单的论坛系统.zip
- awesome-joplin:Jo精选的乔普林主题和工具清单
- CAD墙面浮雕图块装饰素材1(11款)
