iNEMO™惯性导航模块:工作原理与应用
需积分: 1 70 浏览量
更新于2024-07-23
收藏 1.42MB PDF 举报
"惯性导航仪是一种基于微电子机械系统(MEMS)技术的传感器装置,通常包含加速度计、陀螺仪、磁力计,以及压力和温度传感器。这种设备能够提供3轴线性的线加速度、角速度和磁场强度的测量,同时结合温度和气压读数,形成一个10自由度的传感器平台,如ST公司的iNEMO V2。惯性导航仪通过集成的传感器融合算法,可以实现对设备姿态、方向和动态运动的精确计算和跟踪。"
惯性导航仪的核心组成部分包括:
1. **加速度计**:加速度计用于检测设备在三个轴向上的线性加速度。在静态条件下,它能感知重力的投影,从而计算出设备的倾斜角度。
2. **磁力计**:磁力计测量地球的磁场强度,同样在静态条件下,通过对地磁场在三个轴上的投影分析,可以确定设备的航向角度。
3. **陀螺仪**:陀螺仪测量设备围绕三个轴的角速度。在动态环境中,通过连续整合三个轴的角速度数据,可以计算出设备的实时三维姿态。
4. **压力和温度传感器**:这些传感器提供的气压和温度读数有助于校正环境因素对测量结果的影响,例如高度计算。
5. **传感器融合**:惯性测量单元(IMU)中的传感器融合算法是关键,它将来自不同传感器的数据综合分析,以提高定位和导航的精度。这允许设备在无外部参考信号的情况下持续更新其位置和姿态信息,特别适用于航空、航海、自动驾驶汽车等领域。
惯性导航仪的应用广泛,包括但不限于:
- 航空航天:飞机、导弹等飞行器的姿态控制和导航。
- 船舶导航:在水下或远离GPS信号的区域,提供准确的位置信息。
- 自动驾驶:车辆定位、避障和路径规划。
- 工业机器人:精确的运动控制和姿态校正。
- 地质勘探:地下设备的移动跟踪。
- 运动健康:监测人体运动,如跑步、骑行时的步态分析。
iNEMO平台的出现使得惯性导航技术变得更加易用和普及,通过集成多种传感器并内置智能算法,为开发者提供了强大的工具来开发各种创新应用。
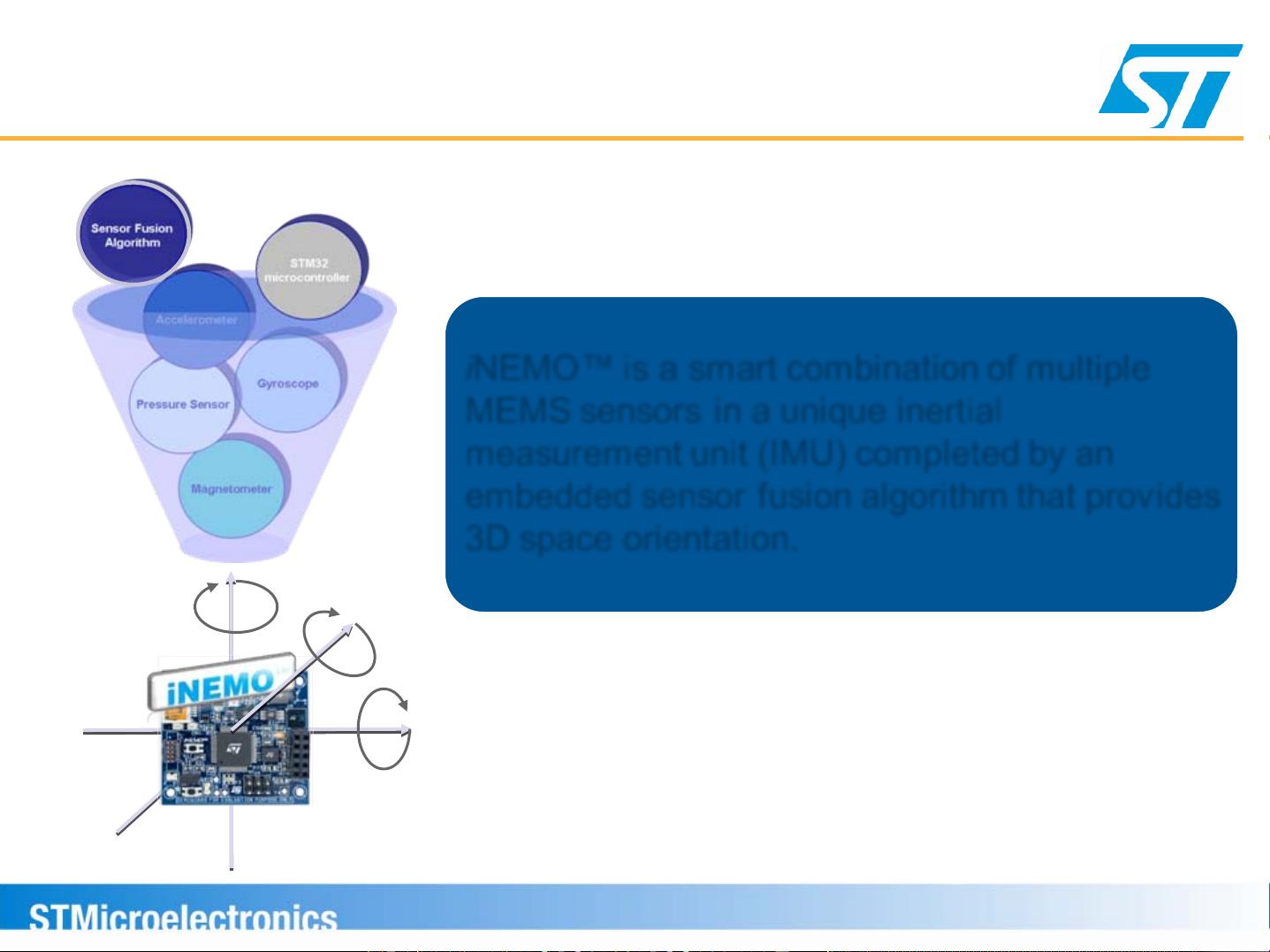
iNEMO™ is a smart combination of multiple
MEMS sensors in a unique inertial
measurement unit (IMU) completed by an
embedded sensor fusion algorithm that provides
3D space orientation.
iNEMO™ sensor fusion concept
剩余16页未读,继续阅读
2022-07-15 上传
2012-11-30 上传
2022-07-15 上传
2021-09-29 上传
2022-09-24 上传
117 浏览量
2022-07-14 上传
2021-10-03 上传
2022-07-13 上传

lmg2014
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
