智能车摄像头信号处理与图像采集技术解析
"摄像头信号传输与识别的算法主要涉及图像采集、路径识别和摄像头的选择与工作原理。在智能车应用中,摄像头扮演着至关重要的角色,通过捕获图像并进行处理来识别赛道路径。本文详细讨论了黑白摄像头和彩色摄像头的区别,以及CCD和CMOS两种成像技术的优劣。"
摄像头信号传输与识别是智能车系统的核心部分,它涉及到如何将摄像头捕捉到的图像信息转化为可供计算机处理的数据。首先,图像采集是通过摄像头的模拟信号经过DSP(数字信号处理器)的A/D转换,将模拟信号转为数字信号,以便进一步分析。在智能车应用中,通常选择黑白摄像头,因为赛道的黑白对比使得灰度信息足以完成寻线任务,同时降低了数据处理的复杂性和硬件需求。
黑白摄像头与彩色摄像头的主要区别在于是否需要处理色彩信息。在寻线任务中,色彩信息并不重要,因此黑白摄像头能提供更为高效的图像处理。另一方面,摄像头的成像原理分为CCD(Charge-Coupled Device)和CMOS(Complementary Metal-Oxide-Semiconductor)两种。CCD的图像质量通常优于CMOS,但功耗较高;而CMOS则更加节能,适合对能耗有严格要求的系统。
摄像头的工作方式是通过逐行扫描图像,将每个点的灰度转换为相应的电压值,输出连续的视频信号。行同步脉冲和场同步脉冲用于指示图像的行边界和帧边界,确保正确地捕获和解析图像。在PAL或NTSC制式下,每秒会产生50场图像,每20毫秒形成一幅完整的图像,这对于实时的智能车控制系统来说是关键的时间基准。
摄像头的性能指标主要包括有效像素和分辨率。有效像素是指实际能够用于成像的像素数量,而分辨率通常由行同步脉冲的数量决定,它直接影响图像的清晰度和细节表现。在设计智能车的图像处理系统时,必须考虑这些参数以确保摄像头能够准确地捕捉和识别赛道的特征。
在实际应用中,识别算法可能包括边缘检测、阈值分割等技术,以定位赛道的边界。这些算法的选择和优化将直接影响智能车的路径跟踪性能。例如,可以通过Canny边缘检测算法找出图像中的黑白边界,或者使用霍夫变换检测直线,从而确定赛道的位置。此外,还可以结合其他传感器数据(如超声波或红外传感器)提高路径识别的鲁棒性。
摄像头信号传输与识别是智能车技术中的重要一环,涉及图像采集、处理、识别算法以及摄像头的硬件选择。理解这些基本概念和工作原理,对于设计和优化智能车的导航系统至关重要。
有关摄像头组的材料
图像采集与路径识别
要实现一个完整的基于摄像头的智能小车,第一步要做的就是将摄像头输出的模
拟信号通过 DSP 的 A/D 转换采集到 DSP 中,然后对采集到的原始图像数据进行
处理,以获取赛道中央的黑线在图像坐标系中的位置。接着,就要利用处理得到
的图象信息对智能小车进行控制。
所以,可以说对于基于摄像头的智能小车,图像采集是至关重要的。只有做
好了图像采集,才谈得上“智能”,否则小车只能是个“瞎子”
摄像头。
要做图像采集,那么首先要选择好摄像头。
摄像头分黑白和彩色两种,由于赛道是“白底黑线”,所以为达到寻线目的,
只需提取画面的灰度信息,而不必提取其色彩信息,所以我们选择采用黑白摄像
头。较使用同等分辨率的彩色摄像头而言,这样可减少单片机采样的负担。
此外,摄像头根据成像原理,分为 CCD 和 CMOS 两种,CCD 成像效果好,CMOS
更省电,可以根据自己队的侧重点进行选择。
摄像头的工作原理是:按一定的分辨率以隔行扫描的方式采集图像上的点,当扫
描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一对应的
电压值,然后将此电压值通过视频信号端输出。
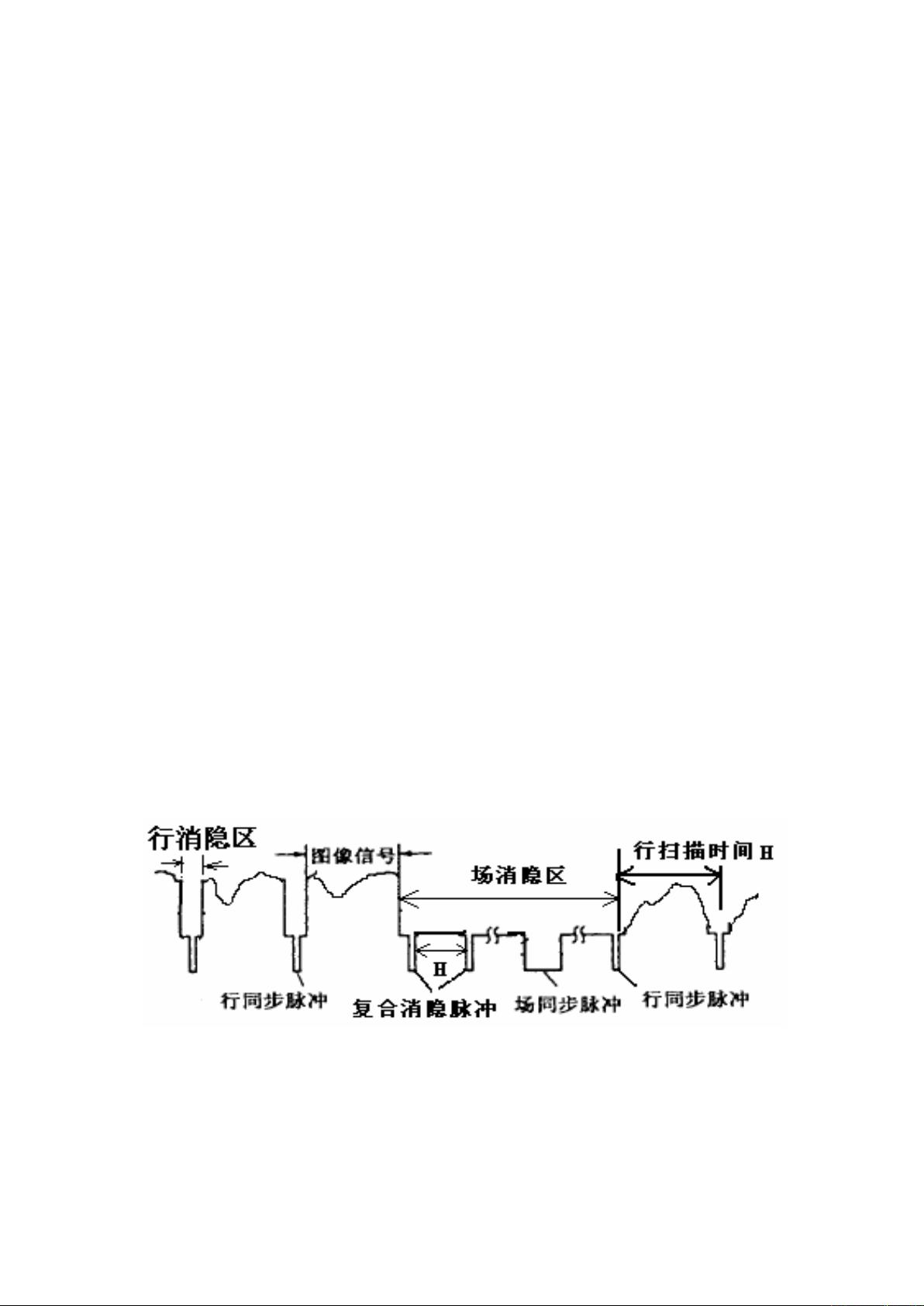
摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,该
电压信号的高低起伏反映了该行图像的灰度变化。当扫描完一行,视频信号端就
输出一个低于最低视频信号电压的电平(如 0.3V),并保持一段时间。这样相当
于,紧接着每行图像信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉
冲,它是扫描换行的标志。然后,跳过一行后(因为摄像头是隔行扫描的),开
始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着又会出现一段场
消隐区。该区中有若干个复合消隐脉冲,其中有个远宽于(即持续时间长于)其
它的消隐脉冲,称为场同步脉冲,它是扫描换场的标志
摄像头每秒扫描 25 幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描
50 场图
像。奇场时只扫描图像中的奇数行,偶场时则只扫描偶数行。
由于奇场和偶场在空间上相差非常小,所以可以忽略奇偶场差别。
也就是说,每秒有 50 副图像产生,每 20ms 就有一副完整的图像产生。(所以基
于 CCD 的小车控制周期即为 20ms)
下载后可阅读完整内容,剩余5页未读,立即下载
142 浏览量
208 浏览量
1072 浏览量
753 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
1347 浏览量
点击了解资源详情

酱油人
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- SAP BC400 课程中文自学笔记
- 北京邮电大学模拟电子技术课件
- Multi 9系列C65系列小型断路器产品目录
- TASCAM MD350快速使用手册.doc
- PLSQL教程.doc
- WAP Push SP接口协议
- Linux Socket Programming by Example [Que 2000 No-Bookmark].pdf
- oracle sql优化100条
- LPC_CAN接受滤波器AFMR设置.pdf
- ARM7数据手册.pdf
- Informix 常见问题处理
- ARM常见疑难问题答疑
- 480中文使用说明书
- 计算机二级 c++(45套试题)
- Spring 开发指南
- Direct3D9初级教程
