神经网络控制PMSM:实时IP位置控制策略
需积分: 10 13 浏览量
更新于2024-08-12
1
收藏 735KB PDF 举报
"PMSM神经网络实时IP位置控制 (2003年)"
本文主要探讨了一种针对永磁同步电机(PMSM)的新型控制策略——基于神经网络的实时IP位置控制。PMSM因其高气隙磁密、小扭矩脉动、大转矩/惯量比和高效率等特点,在伺服系统中被广泛使用。然而,其复杂的运行环境和多变量、非线性、强耦合的特性给控制带来了挑战。
传统的控制器,如PI控制器,可能会受到电机参数变化和负载扰动的影响,导致动态响应和抗扰能力不佳。为解决这些问题,研究者提出了多种控制策略,包括滑模变结构和自适应控制。尽管这些策略在一定程度上提高了控制效果,但它们要么线性化设计模型限制了鲁棒性,要么设计过程过于复杂。
在这种背景下,该论文提出了一种神经网络实时IP位置控制器。这种控制器利用神经网络的优势,比如其自学习和并行处理能力,能够实现简单的结构和快速的权值调整,以适应电机状态的变化。同时,论文还采用了混合神经网络作为PMSM系统的辨识器,通过多步预测性能指标函数进行实时在线训练,增强了系统的辨识能力和预测准确性。
通过理论分析和实验仿真的对比研究,该方法表现出优秀的动态性能和鲁棒性,能够有效应对电机参数变化和外部扰动,同时保持对参考信号的快速响应和对扰动的抑制能力。这一方法不仅继承了IP控制器结构简洁的特点,还在性能上有了显著提升,为PMSM的伺服控制系统提供了新的解决方案。
这篇2003年的论文为PMSM的控制领域带来了一种创新的方法,它结合了神经网络的智能学习和IP控制的高效性,对于提高伺服系统的性能具有重要意义,特别是在面对不确定性因素时的适应性和稳定性。这一研究对后续的电机控制技术发展产生了积极影响,并为实际应用提供了理论基础。
收稿日期
基金项目 辽宁省自然科学基金资助项目
作者简介 挝李鸿儒 男 辽宁绥中人 东北大学副教授 博士 顾树生 男 黑龙江绥化人 东北大学教授 博士生导师
第卷第期
年 月
东 北 大 学 学 报 自 然 科 学 版
Journal of Northeastern UniversityNatural Science
Vol No
Feb
文章编号
PM SM 神 经 网 络 实 时 IP 位 置 控 制
李鸿儒 顾树生
东北大学 信息科学与工程学院 辽宁 沈阳
摘 要 对永磁同步电机PMSM 提出了一种基于神经网络的实时 IP 位置控制方案
根据伺
服系统中的 IP 控制策略 利用神经网络的优点设计了神经网络实时 IP 位置控制器
所设计的神经
网络实时 IP 位置控制器结构简单 权值调整计算量小 速度快
同时用混合神经网络作为 PMSM
系统辨识器 用多步预测性能指标函数实现了实时在线训练
理论分析和实验仿真对比研究的结
果 表明所提出方法具有优越的动态性能和鲁棒性
关 键 词 IP 位置控制器 永磁同步电机 神经网络 辨识器 多步预测 性能指标函数
中图分类号 T M TP 文献标识码 A
永磁同步电机 PM SM 具有气隙磁密高 转
矩脉动小 转矩惯量比大 效率高等优点 在中小
容量的伺服系统中得到了广泛应用
由于伺服系
统运行情况比较复杂 PMSM 本身又是一个多变
量 非线性 强耦合的系统 一般的常规控制器 容
易受电机参数变化和负载扰动等不确定性的影
响 而且动态响应和抗扰能力不能很好地兼顾
为
了克服这些不足 多种消除不确定性影响的控制
策略已相继提出
然而 这些策略中文献
基本上还是按着线性设计模型得到的 鲁棒性
难以得到保证
文献 利用滑模变结构和自适
应控制思想设计了位置控制器 取得了较好的控
制效果 但设计很繁琐
文献仅仅是速度控制
器的设计
在对参考信号的快速响应和对扰动的抑制方
面 IP 控制器要比 PI 控制器优越 同时 IP 控制器
和 PI 控制器一样结构简单
所以在伺服系统中多
采用 IP 控制器
然而 从结构上讲 IP 位置控制器
还是不能独立地对响应特性和负载转矩扰动进行
补偿
IP 位置控制器对系统参数和负载转矩的变
化的补偿能力还非常有限
鉴于此 由于神经网络
对非线性函数具有非凡的逼近能力和在交流传动
中的成功应用
设计了神经网络 IP 位置控制
器
所设计的神经网络 IP 位置控制器结构简单 权
值具有明确的物理意义 可在线快速调整
用混合
神经网络作为 PMSM 系统辨识器
用多步预测性
能指标函数训练神经网络位置 IP 控制器
神经网络实时 IP 位置控制器设计
PM SM 系统的位置调节器为比例环节 速度
调节器为 IP 环节 设计时合二为一 称为 IP 位置
控制 器
如 图 所 示
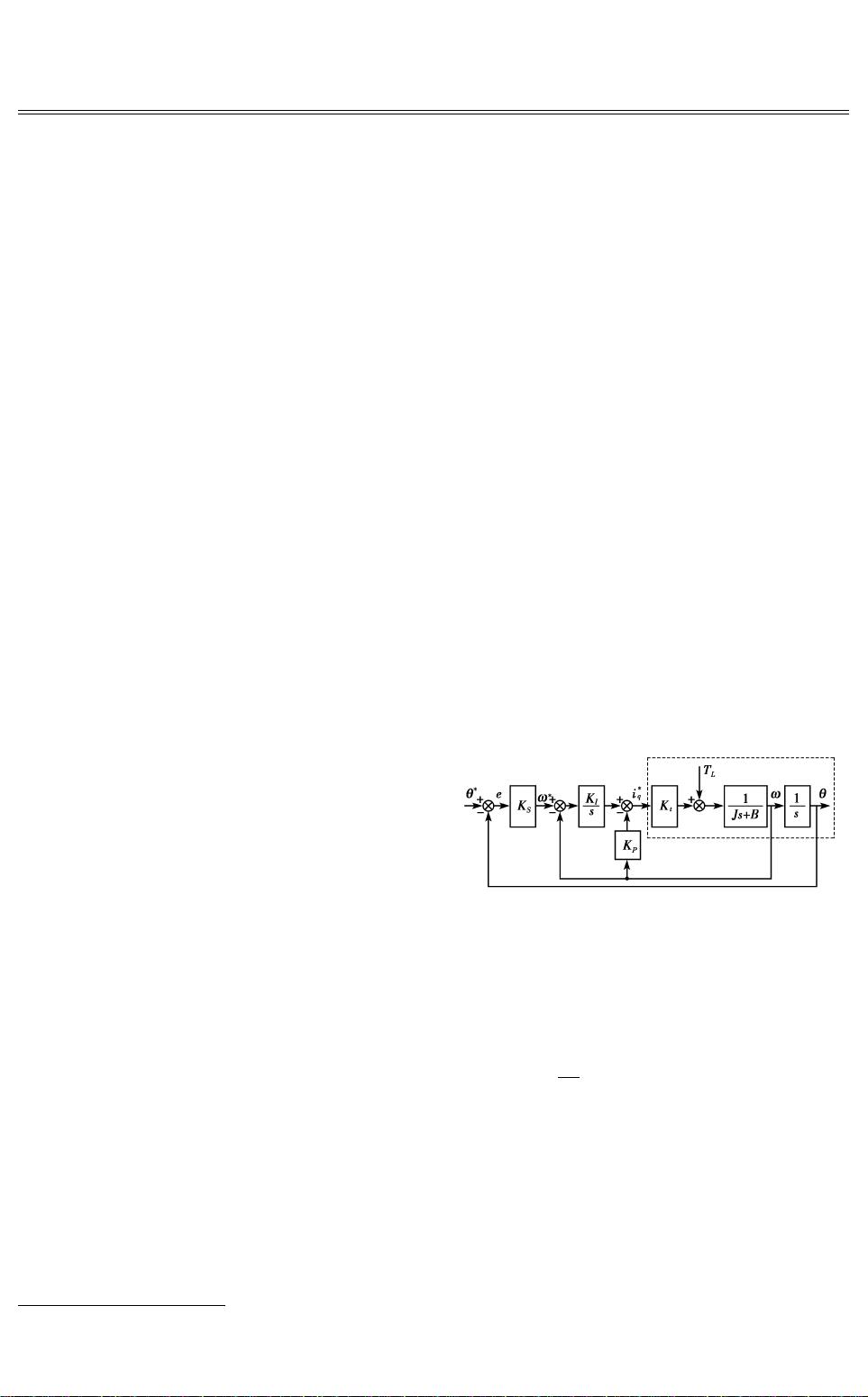
图 中 虚 线 框 内 部 分 为
PM SM 驱动系统简化模型
图 1 简化的 PMSM IP 位置控制系统
Fig 1 BThe simplified IP position control system
for PMSM
由图中的 IP 位置控制器可得
es
s
s
s K
S
es
i
q
s
K
I
s
s
s K
P
s
离散化有
ek
k
k
k k
s
ek
i
q
k K
I
T
S
k
j
j
K
I
T
S
k
j
j
K
P
k
下载后可阅读完整内容,剩余3页未读,立即下载
2021-09-26 上传
2021-09-25 上传
2022-07-14 上传
2022-09-21 上传
2021-09-26 上传
2022-07-14 上传
2022-07-15 上传
2022-07-15 上传

weixin_38748740
- 粉丝: 4
- 资源: 940
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
