




"YOLOv1到YOLOv3:目标检测的进化之路"
需积分: 0 118 浏览量
更新于2023-12-22
收藏 5.06MB PDF 举报
目标检测技术在人工智能领域中扮演着至关重要的角色,能够对图像或视频中的特定物体进行定位和识别。而从YOLOv1到YOLOv3的发展历程,展示了目标检测技术的不断进步和完善。YOLOv1是在RCNN、Fast-RCNN和Faster-RCNN之后,Ross Girshick提出的一种针对深度学习目标检测速度问题的框架。其核心思想是将目标检测问题转化为一个回归问题,通过将整个图像分成SxS个格子,每个格子负责预测包围框的位置和物体类别。相比之前的方法,YOLOv1在GPU上能达到155fps的速度,但在准确度和定位精度方面仍有提升空间。
随后,YOLOv2和YOLOv3相继推出,分别在改进网络结构、损失函数和训练策略等方面取得了重大进展。YOLOv2采用了一些新的技术,如卷积加权损失、多尺度预测、Batch Normalization等,从而显著提高了检测精度和定位精度。而YOLOv3在保持速度优势的同时,进一步加强了网络的深度和宽度,引入了残差连接和特征金字塔网络,有效提升了对小目标和密集目标的检测能力。此外,YOLOv3还引入了多尺度训练和多尺度测试的策略,使得模型在不同尺度下都能取得良好的效果。
然而,目前的检测数据集仍存在一些限制,例如分类标签信息不足、图片数量有限等问题。为了更好地训练和评估目标检测模型,建议结合分类数据集和检测数据集,充分利用已有的大规模图像数据,加强对各种物体类别的识别和定位。此外,还可以探索半监督学习、迁移学习等方法,利用少量标注数据和大量无标注数据,提升模型的泛化能力和适应性。最后,考虑到目标检测在实际场景中的广泛应用,未来的研究方向可以进一步关注模型的鲁棒性、实时性和可解释性,以满足不同领域的需求。
综上所述,从YOLOv1到YOLOv3的进化之路展现了目标检测技术的不断创新和进步,为实现更准确、更高效的目标检测模型奠定了坚实的基础。随着深度学习和计算机视觉领域的不断发展,相信目标检测技术在未来会迎来更多的突破与应用。
2018/10/20 从YOLOv1到YOLOv3,目标检测的进化之路 - CSDN人工智能头条 - CSDN博客
https://blog.csdn.net/guleileo/article/details/80581858 5/22
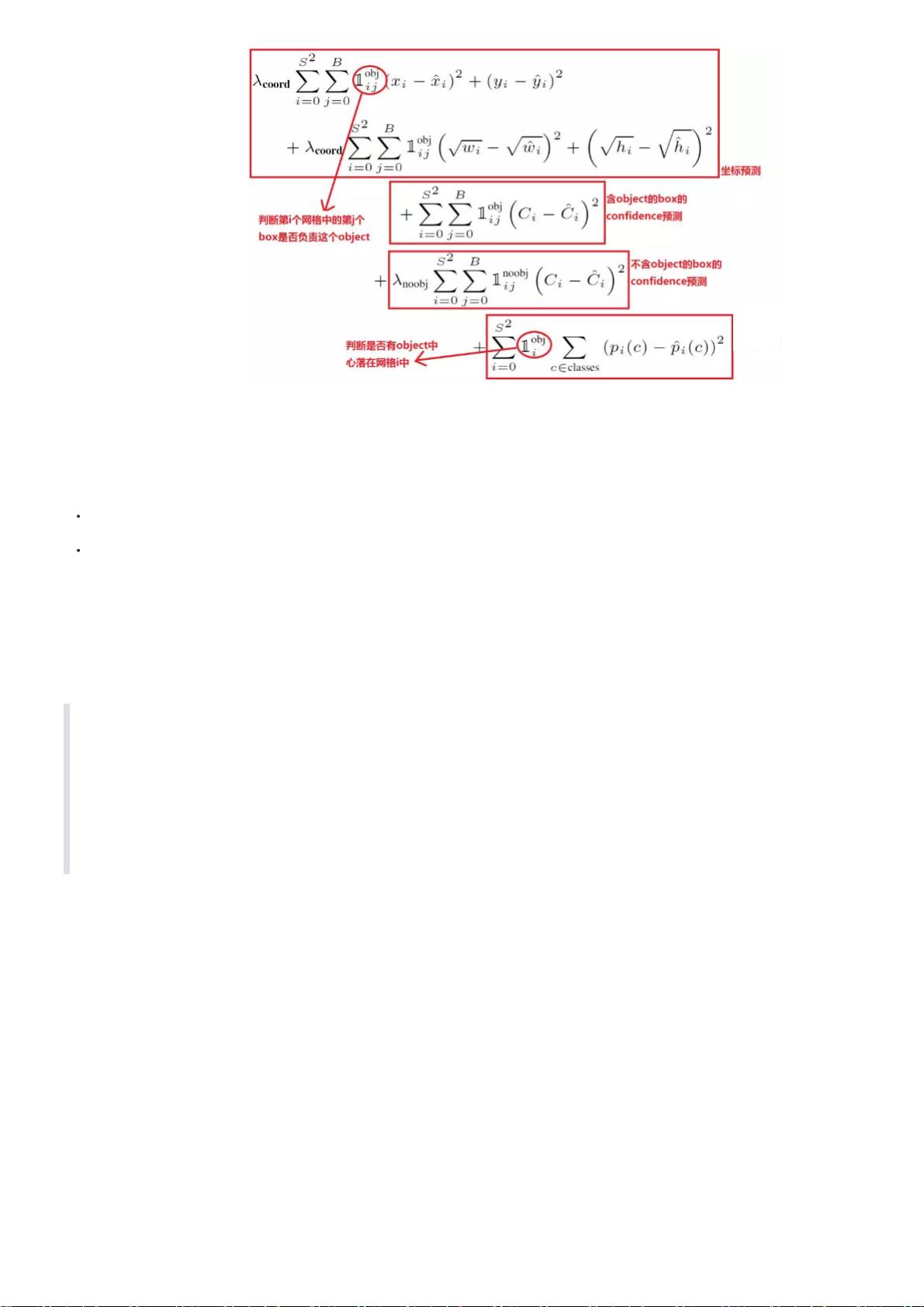
这 个损失函 数中 :
只 有当某个 网格 中有 object 的时候才对 classification error 进行惩罚。
只有当某个 box predictor 对某个 ground truth box 负责的时候,才会对 box 的 coordinate error 进行惩罚,而对哪个 ground truth box 负责就
ground truth box 的 IoU 是不是在那个 cell 的所有 box 中最大。
其 他细节, 例如 使用 激活 函数 使用 leak RELU,模型用 ImageNet 预训练等等,在这里就不一一赘述了。
注 :
*YOLO 方法模型训练依赖于物体识别标注数据,因此,对于非常规的物体形状或比例,YOLO 的检测效果并不理想。
*YOLO 采用了多个下采样层,网络学到的物体特征并不精细,因此也会影响检测效果。
* YOLO 的损失函数中,大物体 IOU 误差和小物体 IOU 误差对网络训练中 loss 贡献值接近(虽然采用求平方根方式,但没有根本解决问题)。因此
体 ,小的 IOU 误差也会对网络优化过程造成很大的影响,从而降低了物体检测的定位准确性。
4.YOLO 的缺点
YOLO 对相互靠的很近的物体,还有很小的群体检测效果不好,这是因为一个网格中只预测了两个框,并且只属于一类。
同一类物体出现的新的不常见的长宽比和其他情况时,泛化能力偏弱。
由 于损失函 数的 问题 ,定 位误 差是 影响 检测 效果 的主 要原 因。 尤其 是大 小物体的 处理 上, 还有 待加 强。
YOLOv2
下载后可阅读完整内容,剩余21页未读,立即下载
203 浏览量
670 浏览量
196 浏览量
158 浏览量
3250 浏览量
300 浏览量
453 浏览量
326 浏览量

张景淇
- 粉丝: 42
 我的内容管理
展开
我的内容管理
展开








最新资源
- 深入探究PHP框架Massimo2的特性与应用
- EhLib 6.3.184:面向多种Delphi版本的组件库更新
- 幼儿智力游戏系统开发与编程参考
- Oracle考题精讲与实战解析
- 快速提升开发技能:struts+hibernate论坛源码解析
- Lazy-uiautomatorviewer: 提升安卓自动化测试效率的工具
- Linux命令大全:详尽解说及实例,CHM格式查阅
- 微控制器驱动的CheckPM微尘测量管理服务
- 探索AmazingsWPFControls:炫丽UI的开源新秀
- Oracle基础入门课程:详尽内容与丰富试题
- C++实现图像变形效果:膨胀、扭曲与涟漪
- 3D屏保:全球排名第一的无病毒保护程序
- STM32开发HMI串口屏幕教程详解
- 煤矿安全实时监控系统的设计与实现
- WAP2.0开发教程:ASP源码解析与实践指南
- 《俺爹俺娘》纪录片非时空再现分析






















