STM32F405驱动的分布式电液伺服控制器在仿生液压四足机器人中的应用
86 浏览量
更新于2024-09-04
1
收藏 377KB PDF 举报
"仿生液压四足机器人伺服控制器设计,主要涉及了基于STM32F405的分布式电液伺服控制器的构建,利用双CAN总线实现控制指令与状态反馈的独立,以及数字伺服阀驱动电路的设计,采用PWM驱动MOSFET全桥方式。"
本文针对仿生液压四足机器人的伺服控制需求,提出了一种基于STM32F405微控制器的分布式电液伺服控制器设计方案。STM32F405是一款高性能的ARM Cortex-M4内核单片机,广泛应用于工业控制和嵌入式系统中,具备高速计算能力和丰富的外设接口,适合处理复杂的控制任务。
在控制系统设计中,采用了双CAN(Controller Area Network)总线架构。CAN总线是一种工业标准的串行通信协议,以其高可靠性、抗干扰性强和传输距离远等特点,常用于汽车和工业自动化领域。在本设计中,双CAN总线将控制指令总线和状态反馈总线分离,提高了系统的实时性和准确性。独立的控制指令总线用于发送伺服控制指令,状态反馈总线则用于收集各个关节的状态信息,如位置、速度和力矩等,确保了系统的快速响应和准确控制。
伺服指令设计基于CAN总线通信协议,采用单帧伺服指令,使得指令传输更加高效。同时,设计了纯数字伺服阀驱动电路,通过PWM(Pulse Width Modulation)信号驱动MOSFET全桥,这种方式能精确控制伺服阀的开启时间和幅度,进而精细调节液压缸的运动,确保四足机器人的精准动作。
四足仿生机器人在军事和特殊地形探索中有着广阔的应用前景,尤其在复杂地形下的行走能力远超传统轮式或履带式机器人。每个机器人的腿部由三个主动关节和一个被动关节组成,全部由液压缸驱动,这种设计模拟了动物的运动机制,增加了机器人的机动性和适应性。分布式控制系统架构解决了多通道控制与单一通道控制精度之间的矛盾,以及硬件资源分配问题,提升了系统整体的稳定性和控制精度。
在系统架构设计上,采用了四个伺服控制器,每个控制器对应机器人的一个腿,负责三个液压伺服单元的控制。这种模块化设计使得软件系统的开发更为简单,同时也便于硬件的维护和扩展,确保了系统在满足精度和实时性要求的同时,具有良好的可扩展性和可靠性。
总结来说,该文介绍的仿生液压四足机器人伺服控制器设计融合了先进的微处理器技术、通信协议和驱动电路设计,为实现复杂环境下四足机器人的稳定运动提供了有力的技术支持。
仿生液压四足机器人伺服控制器设计仿生液压四足机器人伺服控制器设计
本文结合仿生液压四足机器人的研发指标,设计了基于STM32F405的分布式电液伺服控制器。控制器伺服总线
基于双CAN总线设计,将控制指令总线和状态反馈总线独立分离,并基于CAN总线通信协议设计了单帧伺服指
令。设计了纯数字伺服阀驱动电路,使用PWM驱动MOSFET全桥方式实现。
引言
近年来各类军用机器人在国防领域和地缘战略中发挥着重要的作用。在我国广大西部地区,由于地形复杂、道路崎岖,传统的
轮式或履带式机器人无法满足地形通过性要求,而仿生四足机器人能够较好地满足在非结构化地形条件下可靠行进的任务需
求。液压驱动的仿生四足机器人是近年国内外的研究热点与主攻项目,在其关键技术群中,电液伺服控制技术则是保障仿生液
压四足机器人实现稳定行进功能的核心技术。
1总体设计
1.1控制对象分析
本文依托北京理工大学特种机器人技术创新中心正在研发的一款仿生液压四足机器人展开研究,机器人每条腿具有3个主动自
由度和1个被动自由度,分别为髋侧摆关节、髋正摆关节、膝关节和足部二阶弹簧减震器,全部12个主动关节均由液压缸驱
动。机器人的结构尺寸长为120 cm,宽为50 cm,大腿腿节杆件等效长度(髋关节轴到膝关节轴距离)为40cm,小腿腿节杆件
等效长度(膝关节轴到足端包络圆心距离)为40 cm。在未集成机载液压油源的实验条件下自重118.5 kg。四足仿生机器人整
体结构如图1所示。
图1 四足仿生机器人整体结构
1.2系统架构设计
综合考虑伺服控制任务可以发现,系统性能要求有若干矛盾,如多通道并行伺服控制和单一通道伺服控制精度的时间资源冲突
以及多输入/输出接口设计的硬件资源冲突。使用单一控制器的集中式控制系统很难在时间资源与硬件资源的分配上实现平
衡,从而无法达到任务指标要求。基于上述目标,本系统采用一种分布式系统架构进行电液伺服控制系统的设计工作。本系统
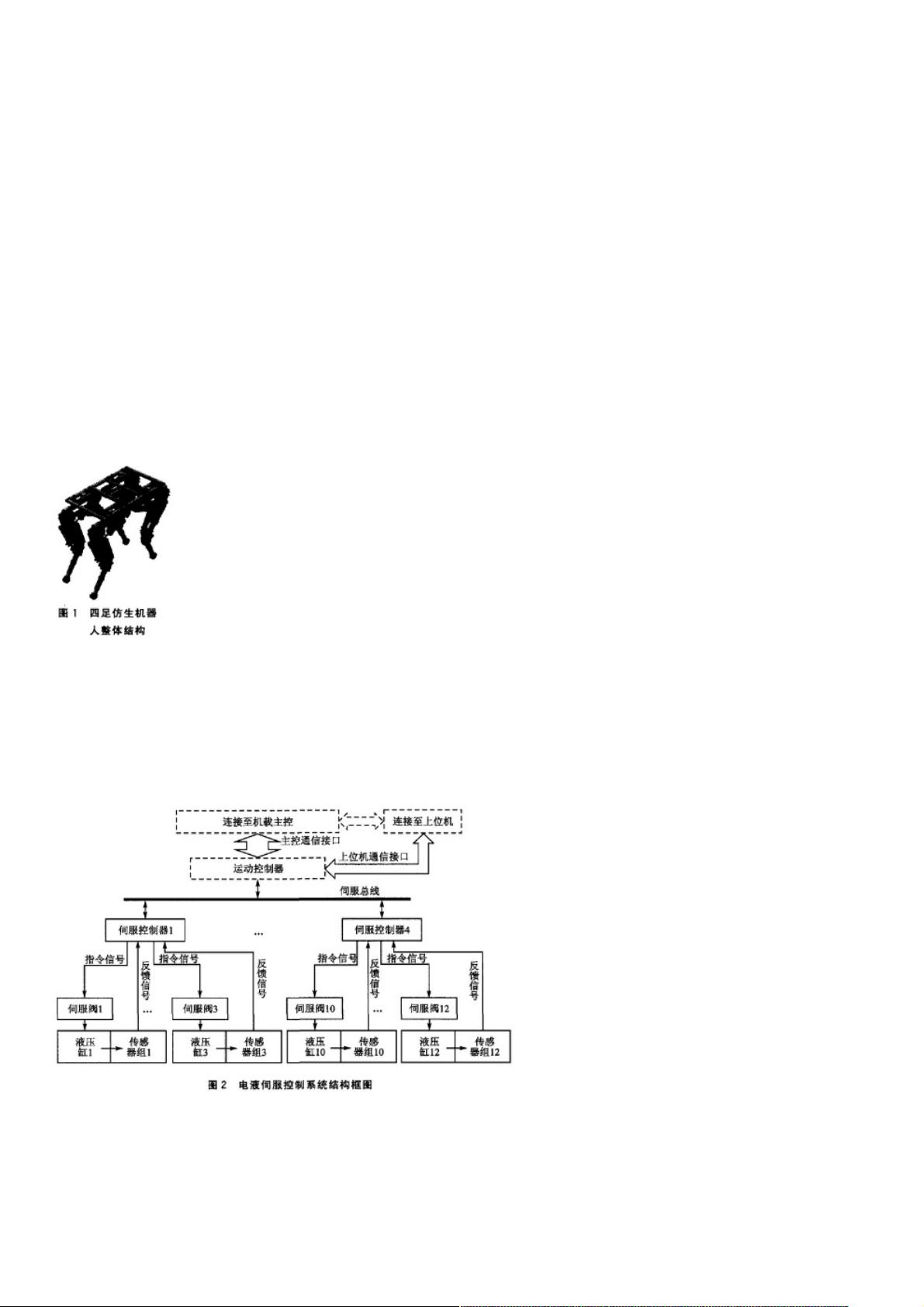
在运动控制器下设计4个伺服控制器,如图2所示,并通过伺服总线连接构成分布式电液伺服控制系统。
图2 电液伺服控制系统结构框图
4个伺服控制器分别负责机器人一条腿上3个液压伺服单元的伺服控制。通过分布式系统架构设计,一方面,拆分简化了控制
任务,使得单个控制器的任务时序更加具有规律性,提高了软件系统的稳定性;另一方面实现了控制系统和机械结构相对应的
模块化设计。该设计兼顾了系统任务中对精度和实时性的要求。
2伺服总线接口设计
伺服总线接口是位于运动控制器与4个伺服控制器之间的总线接口,负责传递下行的各液压伺服单元伺服指令和反馈上行的各
下载后可阅读完整内容,剩余4页未读,立即下载
653 浏览量
119 浏览量
181 浏览量
204 浏览量
2022-07-04 上传
2022-07-04 上传
2021-10-11 上传
2022-11-25 上传
2022-11-24 上传

weixin_38698018
- 粉丝: 6
- 资源: 902
 我的内容管理
展开
我的内容管理
展开







最新资源
- 先进算法讲义-中科大.pdf 需要的下吧
- TD-SCDMA Principle -李世鹤
- rhce5 启动引导troubleshooting实验笔记
- 软件体系结构(ppt版)
- C和C++嵌入式系统编程
- Java企业版中性能调节的最佳实践.pdf
- Log4j中文手册2006_04_07_205056_ZCxoePRlHJ_2.pdf
- AutoCADAutoCAD 2005中文版是美国AutoDesk公司推出的AutoCAD软件的最新版本,它在以前版本的强大功能之上又增加了新的功能。通过本章的学习,读者将对AutoCAD 2005中文版有一个整体上的了解,学会安装和启动的方法,初步了解AutoCAD 2005中文版的界面组成。
- 全国等级考试 二级vf机试题
- The Definitive Guide to Grails Second Edition
- LINUX电子书
- IGBT 应用系统资料!
- 单片机恒温箱温度控制系统的设计
- ARM的嵌入式系统硬件结构设计经典
- MATLAB偏微分方程工具箱简介
- TestLink1.7RC3使用说明书.doc
