"经典教材:Verilog-A/AMS IC设计验证与模拟建模指南"
需积分: 40 34 浏览量
更新于2024-03-15
1
收藏 7.52MB PDF 举报
IC设计验证是一项十分重要的工作,而Verilog-A/AMS则是这一领域的经典教材。Analog Modeling和Mixed-Signal Modeling是IC设计中不可或缺的技术,而《THE DESIGNER'S GUIDE TO VERILOG-AMS》这本书则成为了这一领域中的权威指南。该书由Kenneth S. Kundert和Olaf Zinke编写,介绍了Verilog-AMS的基础知识和实践技巧,帮助读者在IC设计验证中取得成功。
《THE DESIGNER'S GUIDE BOOK SERIES》这个系列中的书籍涵盖了多个领域,包括Verilog-AMS、SPICE和Spectre等。其中,《THE DESIGNER'S GUIDE TO VERILOG-AMS》作为这个系列的重要组成部分,为读者提供了深入探讨Verilog-AMS的独特视角。这本书于2004年首次出版,由Cadence Design Systems出版,成为了学习和实践Verilog-AMS的必备资料。
通过阅读《THE DESIGNER'S GUIDE TO VERILOG-AMS》,读者可以了解Verilog-AMS的基本概念、语法规则和应用技巧。该书详细介绍了Verilog-AMS模型的建立过程,包括模拟和数字系统的结合、混合信号建模等内容。读者可以通过学习本书,了解Verilog-AMS在IC设计验证中的重要作用,提高自己的技术水平和工作效率。
总的来说,《THE DESIGNER'S GUIDE TO VERILOG-AMS》是一本值得推荐的经典教材,适用于IC设计领域的工程师、研究人员和学生。该书深入浅出地介绍了Verilog-AMS的基础知识和实践技巧,为读者打开了一扇通往IC设计验证领域的大门。读者可以通过学习《THE DESIGNER'S GUIDE TO VERILOG-AMS》,提升自己的技术水平,掌握Verilog-AMS的应用技巧,实现在IC设计领域的成功。
3 Mixed-Signal Simulators
Finally, it is important to recognize that Verilog-AMS is primarily used for verifica-
tion. Unlike the digital languages, the AMS languages will not be used for synthesis
in the foreseeable future because the only synthesis that is available for analog circuits
is very narrowly focused.
3
Mixed-Signal Simulators
Mixed-signal simulators, by their very nature, combine two different methods of sim-
ulation: event-driven simulation as found in logic simulators, and continuous-time
simulation as found in circuit simulators. As such, they are said to have two kernels; a
discrete-event kernel and a continuous-time kernel. These two kernels are an essential
feature of any mixed-signal simulator. Indeed, it is what separates mixed-signal simu-
lation from other types of simulation. Within these constraints, mixed-signal simula-
tors have changed considerably through the years.
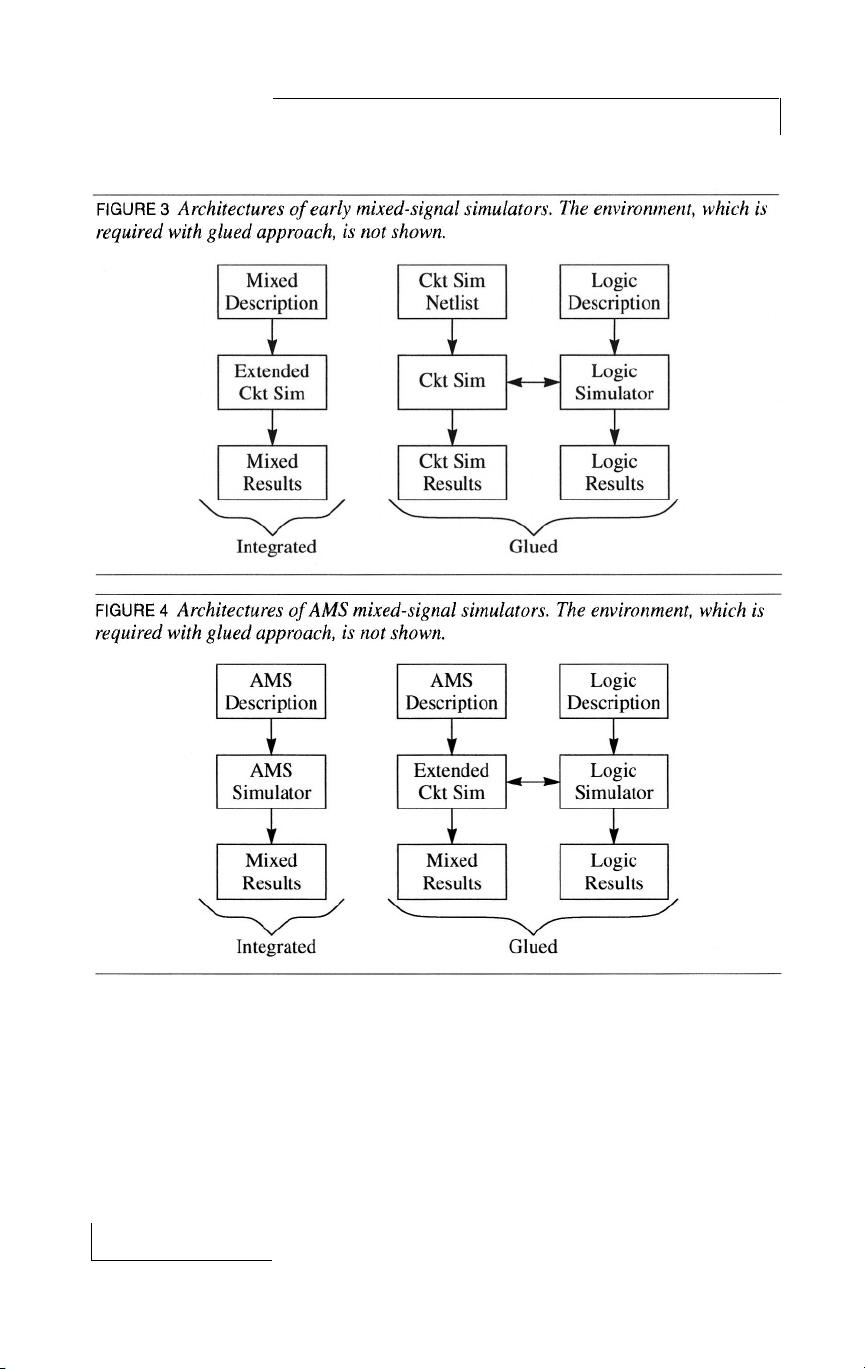
Mixed-signal simulators first established themselves in the early 1990’s. At this time
there were two basic approaches, as shown in Figure 3. In one, a mixed-signal kernel
was added to an established circuit simulator. Analogy’s Saber and Georgia Tech’s
XSPICE are examples. These simulators offered relatively simple and low-level mech-
anisms to support event-driven simulation. They were quite different from, and
incompatible with, the standard logic simulators of the day, such as Verilog-XL. As a
result, while useful, these capabilities never gained wide acceptance. This lack of
acceptance was addressed in the other approach, which simply glued together an
established circuit simulator, generally some form of SPICE, and an established logic
simulator, usually Verilog-XL. An example of this type of simulator is Spectre/Ver-
ilog-XL from Cadence. This approach addressed the lack of acceptance issue, but cre-
ate
d
ease-of-use and performance problems. The ease-of-use problems stem from the
complexity of getting two simulators with very different use models to operate
together. Generally, some form of mixed-signal design environment is required to
manage the process of splitting the netlist between SPICE and Verilog, inserting the
interface components, setting up and running the simulation, and accessing and dis-
playing the results. Even with the environment, glued simulators developed a reputa-
tion of being difficult to use. The performance issues stem from the distant separation
between the analog and digital parts of the circuit, and the overhead in the communi-
cation between the two simulators.
The AMS languages, Verilog-AMS and VHDL-AMS, address many of these issues.
They provide a single standard input language that both supports mixed-signal
descriptions, and is based on the standard languages used by logic simulators. As
such, they provide the advantages of both types of early mixed-signal simulators,
5


剩余279页未读,继续阅读
375 浏览量
点击了解资源详情
887 浏览量
311 浏览量
Verilog-A实战:现成SAR ADC及模数转换器代码的混合信号IC设计与模拟IC开发手册,Verilog-A学习宝典:现成器件代码助力SAR ADC与混合信号IC设计模拟IC行为,Verilog
2025-02-15 上传
176 浏览量
1202 浏览量
点击了解资源详情

ntuzxy
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
