机器人学基础练习与概念解析
版权申诉
101 浏览量
更新于2024-06-23
收藏 774KB DOC 举报
"机器人学综合练习题"
这些练习题涵盖了机器人学的基础概念和技术,包括机器人的定义、特征、分类以及坐标变换和运动学方程。以下是各问题涉及的知识点:
0.1 机器人的定义通常是指能够自主或半自主执行预设任务的智能设备,它们具有多功能性、可编程性和适应性。主要特征包括自动化、灵活性和感知环境的能力。
0.2 "机器人三守则"由艾萨克·阿西莫夫提出,是机器人行为的基本准则,包括:1)不得伤害人类,也不得因不作为使人类受到伤害;2)必须服从人类的命令,除非这与第一定律冲突;3)必须保护自己的存在,但不得违反第一、第二定律。这三个守则在确保机器人安全可靠地与人类共存中起着关键作用。
0.4 机器人的基本组成结构通常包括机械本体、控制系统、感知系统和执行机构。机械本体是机器人的物理结构,控制系统负责决策和指令的生成,感知系统用于获取环境信息,执行机构则根据指令执行动作。
0.5 - 自由度:指机器人可以独立移动或转动的维度数量,决定了机器人的灵活性。
- 重复定位精度:机器人重复到达同一位置的精度,体现其定位的可靠性。
- 工作原理:描述机器人如何通过电机、传感器等实现运动和任务执行的机制。
- 工作速度:机器人执行任务时的移动或动作速度。
- 承载能力:机器人能够承载的最大重量。
0.6 冗余自由度机器人是指具有超过完成特定任务所需最低自由度数目的机器人。这种设计允许更复杂的运动策略,提高精度或避障能力。
0.8 按照机械系统的几何结构,机器人可以分为直角坐标机器人、圆柱坐标机器人、球坐标机器人、关节型机器人(如SCARA)等。
0.9 按控制方式,机器人可分为开环控制、闭环控制和混合控制。开环控制不反馈实际位置信息,闭环控制基于反馈信息调整动作,混合控制结合两者。
0.10 SCARA(Selective Compliance Assembly Robot Arm)机器人是一种特殊类型的关节型机器人,专为装配任务设计,具有在垂直平面内的快速运动和一定的柔顺性。
问题1.x 部分涉及的是坐标变换和旋转算子,包括齐次坐标表示法,旋转和平移矩阵的计算,这些都是机器人学中基础的运动学内容。
1.8 和 1.9 关于二自由度平面机械手的问题涉及到关节坐标系的建立、运动方程的推导及其逆解,这是机器人运动学中的重要概念,用于确定机械手末端执行器的位置。
1.10 对于三自由度机械手,同样需要建立坐标系并推导运动学方程,这在设计和控制机器人运动时至关重要。
这些问题覆盖了机器人学的基础理论,包括机器人定义、控制、运动学和坐标变换,对于理解机器人技术的原理和应用非常有帮助。
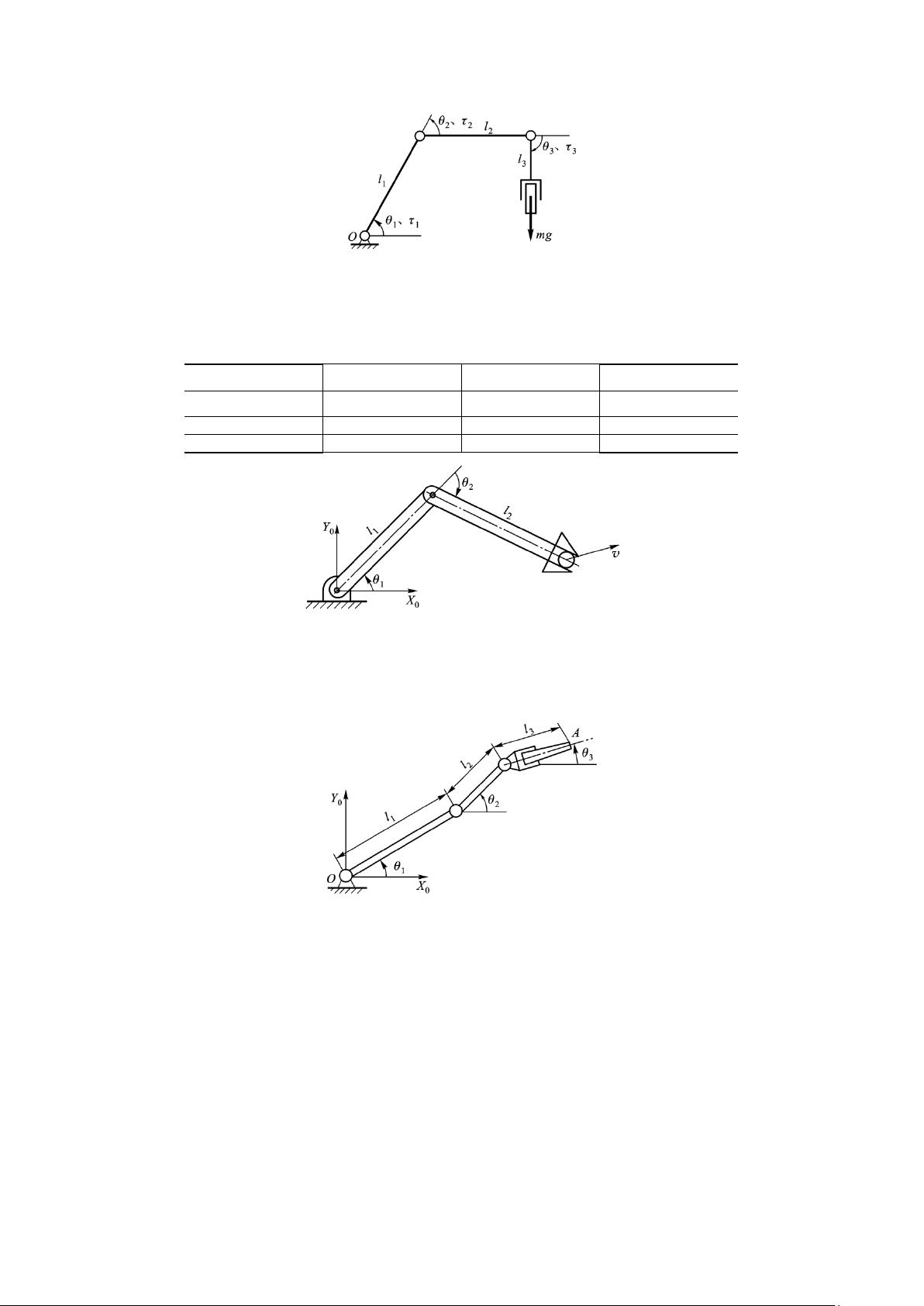
题 2.13 图 三自由度机械手
2.14 如题 2.14 图所示二自由度机械手,杆长 l
1
=l
2
=0.5 m,求下面三种情况时的关节瞬时速度 、
。
v
X
/(m/s)
–1.0
0
1.0
v
Y
/(m/s)
0
1.0
1.0
�
1
30°
30°
30°
�
2
–60°
120°
–30°
题 2.14 图 二自由度机械手
2.15 如题 2.15 图所示三自由度平面关节机械手,其手部握有焊接工具,若已知各个关节的瞬时角度
及瞬时角速度,求焊接工具末端 A 的线速度 v
X
、v
Y
。
题 2.15 图 三自由度平面关节机械手
3.1 】 何谓轨迹规划?简述轨迹规划的方法并说明其特点。
3.2 设一机器人具有 6 个转动关节,其关节运动均按三次多项式规划,要求经过两个中间路径点后停
在一个目标位置。试问欲描述该机器人关节的运动,共需要多少个独立的三次多项式?要确定这些三次多项
式,需要多少个系数?
3.3 】 单连杆机器人的转动关节,从
�
=–5°静止开始运动,要想在 4s 内使该关节平滑地运动到
�
=+80°
的位置停止。试按下述要求确定运动轨迹:
(1) 关节运动依三次多项式插值方式规划。
(2) 关节运动按抛物线过渡的线性插值方式规划。
1
�
&
2
�
&
剩余17页未读,继续阅读
2023-07-12 上传
2023-07-12 上传
2023-07-13 上传
2023-07-12 上传
2023-07-12 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
