




四元数与三维旋转的理解与应用
下载需积分: 0 | PDF格式 | 398KB |
更新于2024-06-29
| 91 浏览量 | 举报
"该资源是一篇关于四元数及其在三维旋转中应用的文章,作者通过简单易懂的方式探讨四元数与3D旋转的关系,使用几何学和线性代数的知识进行推导。文章适合对3D图形学感兴趣的人群,同时也提供了一些MATLAB/Octave的代码示例和相关动画。文章遵循'CCBY-NC-SA4.0'协议发布。"
文章首先介绍了复数的概念,作为理解四元数的基础。复数由实部和虚部组成,可以视为二维空间中的向量。复数的乘法运算结合了欧几里得几何中的旋转,其中i² = -1,这使得复数能够表示2D平面上的旋转。
接下来,文章引出了四元数,它是复数的扩展,用于处理三维空间中的旋转。四元数由一个实部和三个虚部构成,可以表示为q = w + xi + yj + zk,其中w, x, y, z ∈ R,i, j, k是四元数的基,满足i² = j² = k² = ijk = -1。这种表示允许四元数描述三维空间中的旋转而不引入旋转向量的问题,如万向节死锁。
四元数的乘法规则使得它们能够自然地表示角度和轴的旋转。一个单位四元数(模长为1的四元数)可以表示一个旋转,其实部w对应于旋转角的余弦值,虚部(x, y, z)对应于旋转轴上的单位向量。通过四元数乘法,可以轻松地组合多个旋转,这是3D图形学和游戏开发中常用的方法。
文章还指出,相比于矩阵旋转,四元数更加紧凑且计算效率更高,特别是在处理大量旋转时。它们还可以避免使用旋转矩阵可能导致的奇异性和不稳定性。
在实际应用中,四元数常用于3D图形渲染、模拟和姿态控制等领域。作者提供了MATLAB/Octave的代码和动画,帮助读者直观地理解四元数如何表示和执行三维旋转。
最后,文章提到了一些更抽象的内容,包括四元数的代数结构和与群论的联系,但这些不是文章的重点。作者建议对物理学或抽象代数感兴趣的人可以参考扩展阅读材料。
这篇文章是学习四元数及其在三维旋转应用的一个良好起点,尤其适合具有基本线性代数知识的读者。通过深入理解四元数,读者能够更好地掌握3D空间中的旋转表示和计算。

如果我们尝试计算一下 z
ne t
,我们会发现:
z
ne t
= (cos(θ ) + i sin(θ ))(cos(φ) + i sin(φ))
= cos(θ )cos(φ) + i(cos(θ)sin(φ)) + i(sin(θ)cos(φ)) − sin(θ )sin(φ)
= (cos(θ )cos(φ) − sin(θ )sin(φ)) + (cos(θ )sin(φ) + sin(θ )cos(φ))i
这个式子利用三⻆恒等式可以化简为
z
net
= (cos(θ ) + i sin(θ ))(cos(φ) + i sin(φ))
= cos(θ + φ) + i sin(θ + φ)
所以,当我们对两个 2D 旋转进行复合时,所得到的变换 z
ne t
仍是一个旋转,而且
与施加的次序无关.这个等效变换的旋转⻆是 z
1
与 z
2
旋转⻆之和.
2 三维空间中的旋转
在讨论四元数之前,我们先来研究一下三维空间中的旋转.
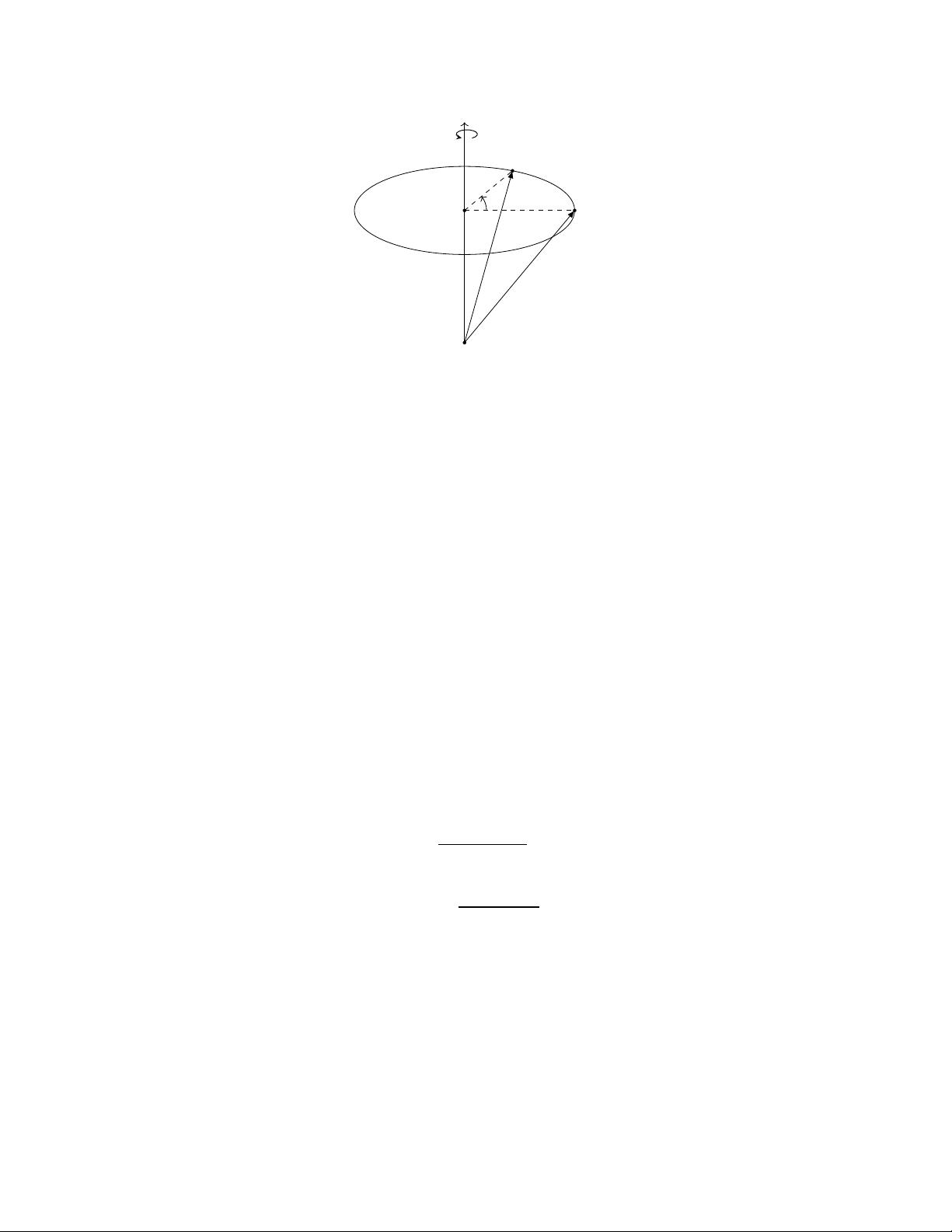
表示三维空间中旋转的方法有很多种,但我们这里关注的是轴⻆式 (Axis-angle) 的
旋转.虽然使用欧拉⻆的旋转很常用,但是我们知道欧拉⻆的表示方法不仅会导致
Gimbal Lock(⻅Bonus 章节)而且依赖于三个坐标轴的选定,使用四元数正是为了解
决这个问题.我们这里所要讨论的轴⻆式旋转是旋转更加普遍的情况:
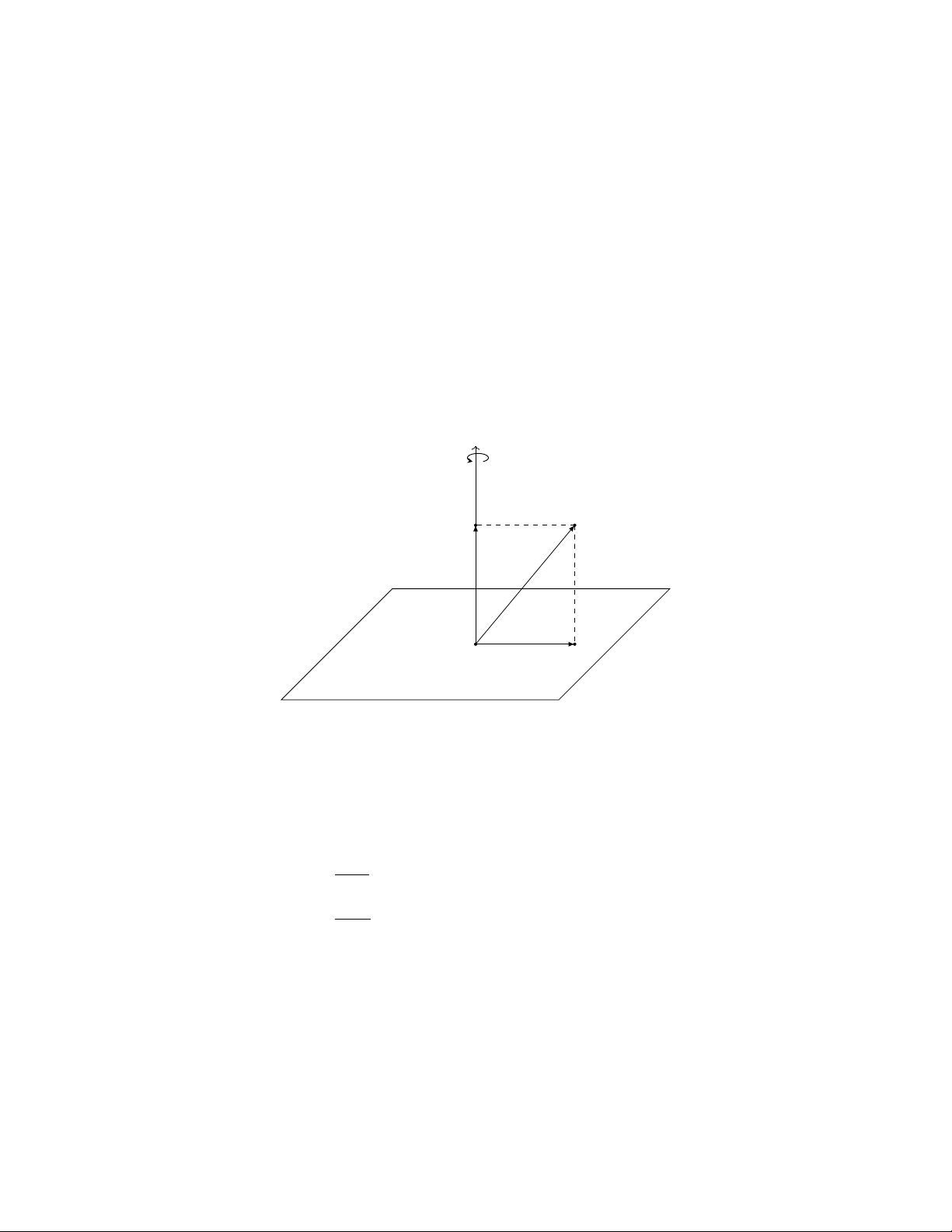
假设我们有一个过原点的(如果旋转轴不经过原点我们可以先将旋转轴平移到原
点,进行旋转,再平移回原处)旋转轴 u =
x
y
z
,我们希望将一个向量 v,沿着这个旋
转轴旋转 θ 度,变换到 v
′
:
11
剩余61页未读,继续阅读
相关推荐
926 浏览量
2022-08-03 上传
163 浏览量
606 浏览量
468 浏览量
181 浏览量
163 浏览量
119 浏览量

兰若芊薇
- 粉丝: 32
 我的内容管理
展开
我的内容管理
展开








最新资源
- grpc.aspnet核心验证器:异步验证与IoC集成
- 使用less-fileloader进行高效HTTP资源加载
- Bootstrap v4.0.0与Bootstrap.Native的融合特性解析
- 易语言键盘记录软件的设计与实现
- Hi3556AV100压缩包问题解决方案与数据手册摘要
- 基于树莓派的传感器软件搭建与配置教程
- CVC:React开发的PWA休假申请简化平台
- MATLAB导数计算功能:开源简历库cv-code-gallery
- React Router 1.0前API变更与安装使用指南
- XX学校请假回访登记表详细分析
- 利用GAN技术实现Fashion MNIST图像生成
- 易语言实现无限长度十六进制转十进制转换器
- Python文件操作技巧:读写方法全面解析
- 在线生成Mcbbs标志图像工具:McbbsSigner
- mcwsp:通过Web套接字代理绕过防火墙玩《我的世界》
- OpenConnect: 探索数据连接的REST API及源与接收器连接器






















