RVDS2.2环境下OK6410裸机调试与GPIO应用指南
需积分: 21 12 浏览量
更新于2024-07-28
收藏 2.48MB PDF 举报
"该文档详细介绍了如何在RVDS2.2环境下,利用J-Link对基于ARM11处理器的OK6410开发板进行裸机调试,特别是通过GPIO来控制LED灯和蜂鸣器,以及检测按键操作和使用定时器实现精确延时控制LED。"
本文档分为12个章节,全面覆盖了从硬件介绍、开发环境搭建、调试工具使用到具体实践应用的各个环节。
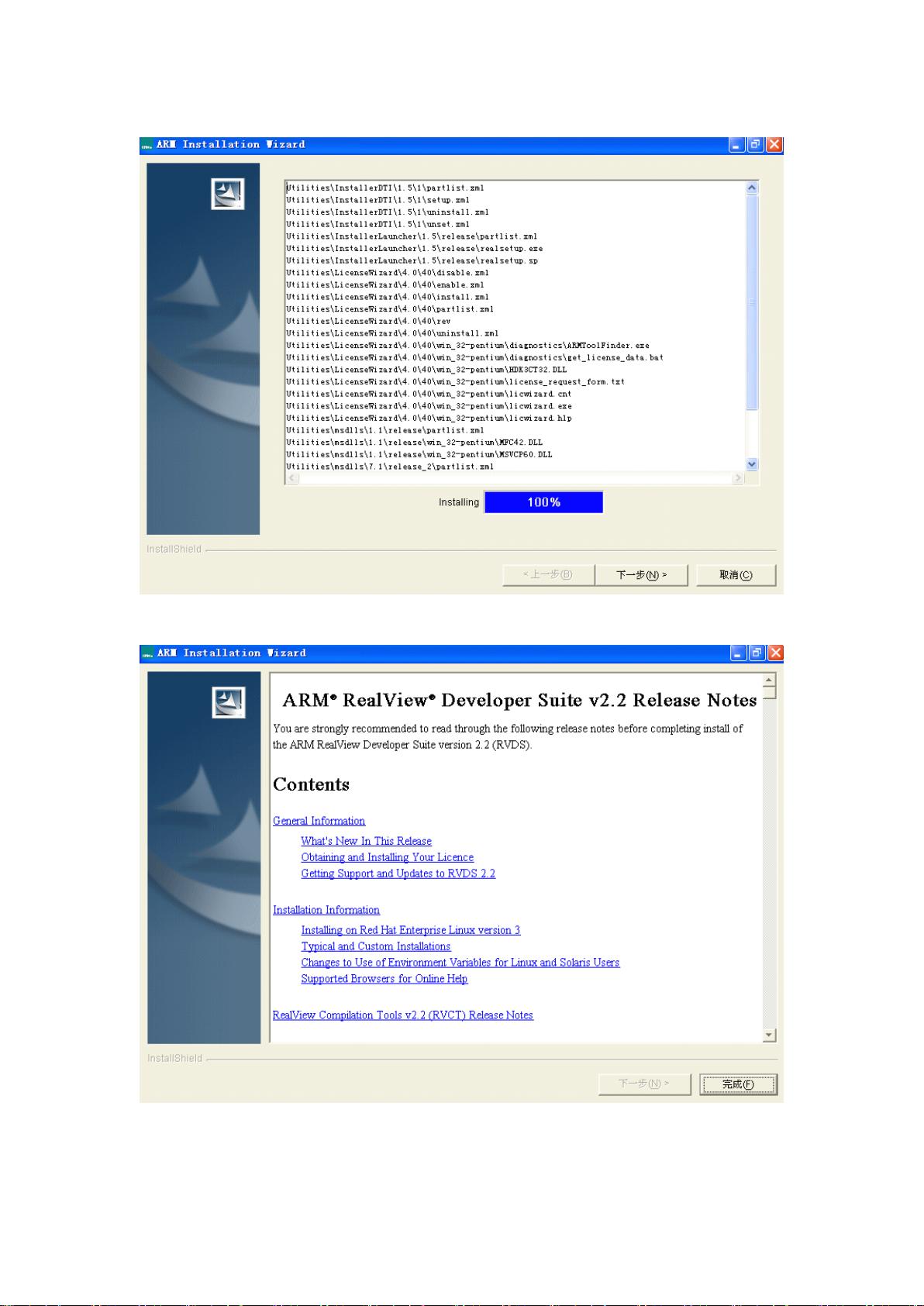
首先,OK6410是一款基于Samsung S3C6410 ARM11处理器的开发板,常用于嵌入式系统的教学和开发。RVDS(RealView Development Suite)是ARM公司提供的一个强大的开发工具链,版本2.2是当时常用的版本,支持多种ARM架构的处理器。
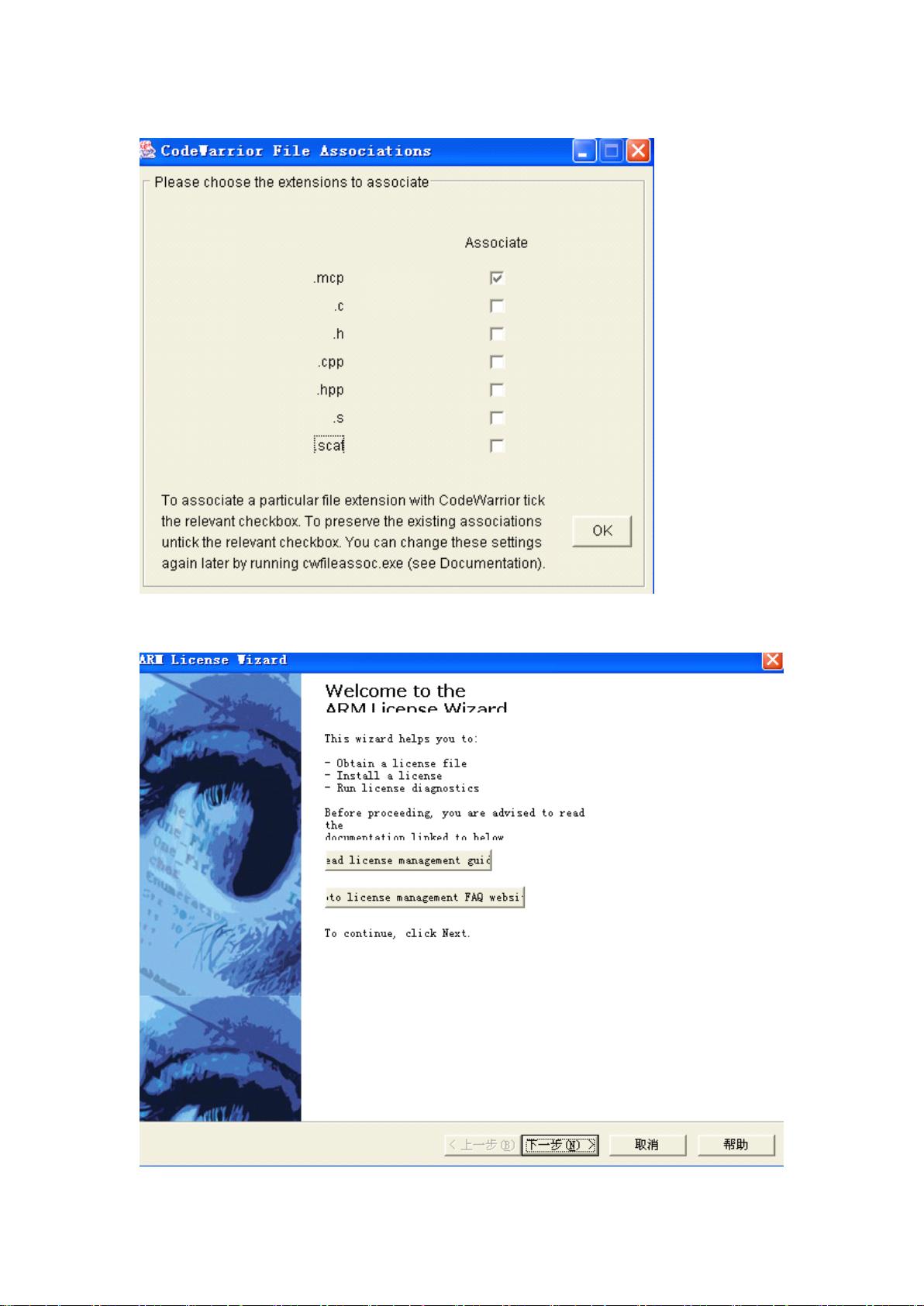
在第二章,详细讲述了如何在Windows XP系统中安装RVDS2.2,这是进行后续开发和调试的基础。第三章介绍了J-Link驱动的安装,J-Link是一款常用的ARM调试器,能够通过USB接口与电脑连接,实现对目标板的程序下载和调试。
第四章至第六章主要讲解了J-Link的连接方法和RVDS2.2的使用。其中,RVDS提供了集成开发环境(IDE),包括CodeWarrior,用于创建、编辑、编译和调试代码。第六章详述了如何在CodeWarrior中新建OK6410裸机工程,添加源码,设置工程属性,以及编译过程。
第七章至第九章主要涉及调试技术。在J-Link的帮助下,可以实现全速运行、设置断点、单步调试等基本功能。第九章则具体介绍了如何通过S3C6410的GPIO(General Purpose Input/Output)接口控制LED灯,包括实验目的、设备、内容、原理、电路设计和程序编写。
第十章和第十一章分别展示了如何使用GPIO控制OK6410上的蜂鸣器和检测按键操作,同样涵盖了实验目标、设备、内容、原理、电路图、程序及步骤。
最后,第十二章介绍了利用定时器来实现精确延时控制LED,这对于实时性和周期性任务的处理至关重要。
通过这个教程,读者将掌握OK6410裸机开发的基本流程,包括开发环境配置、调试技巧以及GPIO、定时器等基本硬件资源的使用,为后续的嵌入式系统开发打下坚实基础。

点击了解资源详情
102 浏览量
点击了解资源详情
104 浏览量
2011-09-03 上传
2011-09-03 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

Arterhwq
- 粉丝: 1
- 资源: 28
 我的内容管理
展开
我的内容管理
展开







最新资源
- FonePaw_Video_Converter_Ultimate_2.9.0.93447.zip
- 162100头像截图程序 4.1
- subclass-dance-party
- JavaScript:Curso完成JavaScript
- Medical_Payment_Classification:确定医疗付款是用于研究目的还是用于一般用途
- P1
- javascript-koans
- 保险行业培训资料:寿险意义与功用完整版本
- ChandyMishraHaasOrAlgo
- maven-repo
- react-as-space
- eclipse-inst-mac64.dmg.zip
- bearsunday.github.io
- ks
- lazytoby.github.io
- 0.96寸OLED(IIC接口)显示屏的图像显示应用
