ABB机器人RAPID程序指令详解
版权申诉
45 浏览量
更新于2024-07-02
收藏 356KB DOC 举报
"ABB机器人实际应用中的指令说明文档主要涵盖了ABB机器人编程语言RAPID的各种指令,包括程序执行控制、变量指令以及程序模块控制等。这些指令对于理解和编写ABB机器人的控制程序至关重要。"
在ABB机器人实际应用中,RAPID程序指令是实现自动化任务的核心工具。以下是对各部分指令的详细说明:
1. **程序执行的控制**:
- **调用例行程序**:`ProcCall`用于直接调用例行程序,而`CallByVar`则允许通过变量来动态调用例行程序,提供更大的灵活性。
- **逻辑控制**:`CompactIF`和`IF`指令用于条件判断,根据条件执行相应代码;`FOR`和`WHILE`循环结构用于重复执行某段程序;`TEST`指令用于基于变量的条件分支;`GOTO`和`Label`实现程序流程的跳转。
- **停止程序执行**:`Stop`指令可立即停止程序运行,`EXIT`不仅停止程序,还阻止在停止点再次启动,`Break`用于手动调试时暂停程序,`ExitCycle`则会中断当前程序并重置程序指针至主程序的起始。
2. **变量指令**:
- **赋值**:`=:`运算符用于对程序数据进行赋值,这是基础的数据处理操作。
- **等待指令**:`WaitTime`指令让程序等待特定时间后再继续执行,`WaitUntil`则在指定条件满足后继续,`WaitDI`和`WaitDO`分别等待输入或输出信号的状态变化。
- **注释**:`comment`指令用于在程序中添加注释,方便理解程序逻辑。
- **程序模块控制**:`Load`指令加载程序模块,`UnLoad`卸载,`StartLoad`在程序运行中加载模块,而`WaitLoad`则是在`StartLoad`之后确保模块加载完成。
这些指令的使用,结合ABB机器人随机附带的光盘说明书,可以构建出复杂的自动化流程,满足各种工业应用场景的需求。例如,通过`IF`和`WHILE`指令可以实现条件判断和循环,`ProcCall`和`CallByVar`则可以设计模块化的程序结构,提高代码的可重用性。`WaitDI`和`WaitDO`指令使得机器人能够根据外部设备的状态进行响应,实现与生产线其他设备的同步。通过熟练掌握这些指令,工程师可以更高效地编写和调试ABB机器人的控制程序,优化生产效率和精度。
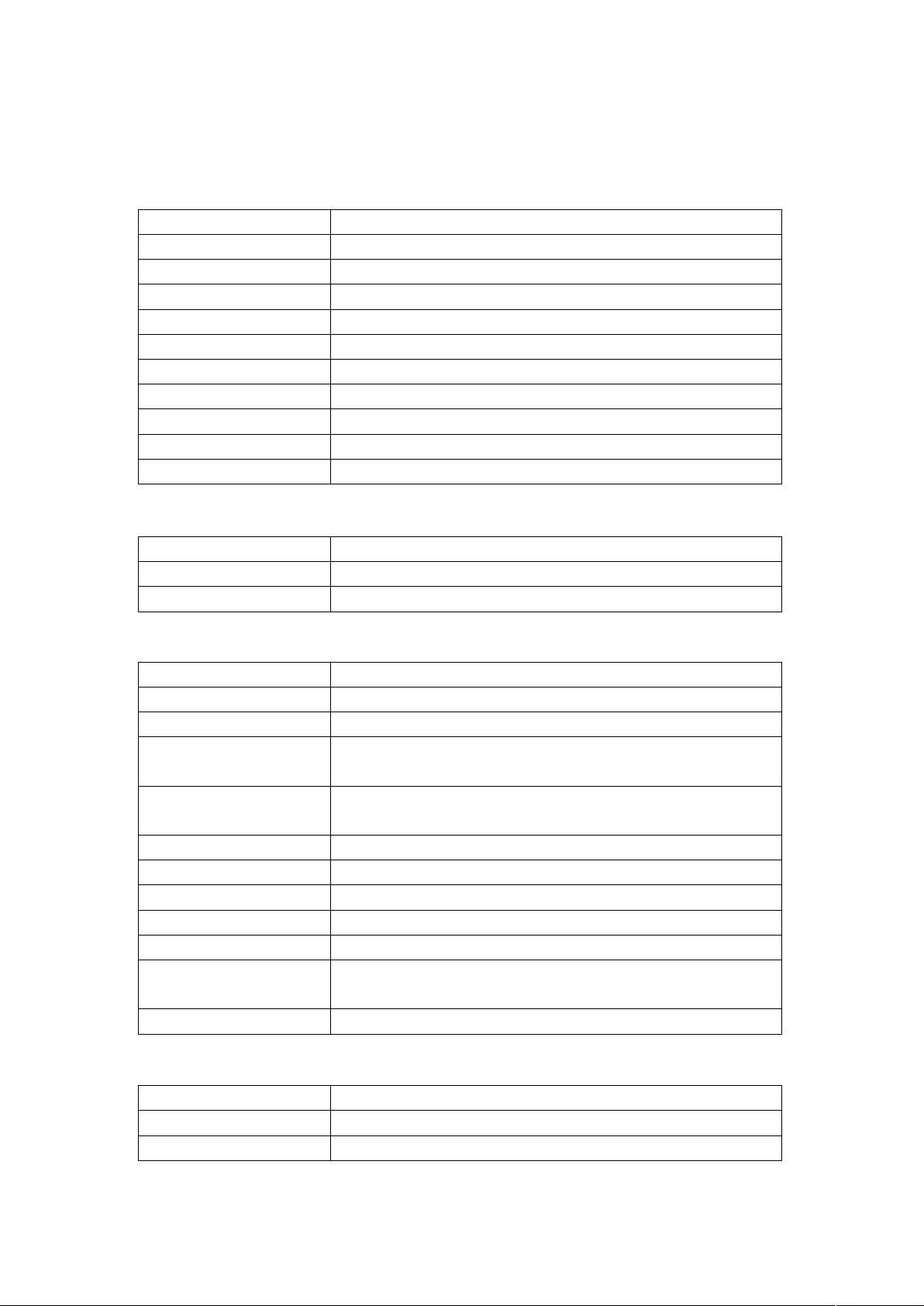
四、运动控制
1、机器人运动控制
MoveC
TCP 圆弧运动
MoveJ
关节运动
MoveL
TCP 线性运动
MoveAbsJ
轴绝对角度位置运动
MoveExtJ
外部直线轴和旋转轴运动
MoveCDO
TCP 圆弧运动的同时触发一个输出信号
MoveJDO
关节运动的同时触发一个输出信号
MoveLDO
TCP 线性运动的同时触发一个输出信号
MoveCSync
TCP 圆弧运动的同时执行一个例行程序
MoveJSync
关节运动的同时执行一个例行程序
MoveLSync
TCP 线性运动的同时执行一个例行程序
2、搜索功能
SearchC
TCP 圆弧搜索运动
SCarchL
TCP 线性搜索运动
SearchExtJ
外轴搜索运动
3、指定位置触发信号与中断功能
TriggIO
定义触发条件在一个指定的位置触发输出信号
TriggInt
定义触发条件在一个指定的位置触发中断程序
TriggCheckIO
定义一个指定的位仪进行 I/O 状态的检查
TrjggEquip
定义触发条件在一个指定的位置触发输出信号,并对
信号响应的延迟进行补偿设定
TriggRampAO
定义触发条件在一个指定的位置触发模拟输出信号,
并对信号响应的延迟进行补偿设定
TriggC
带触发事件的的圆弧运动
TriggJ
带触发事件的关节运动
TriggL
带触发事件的的线性运动
TriggLI0s
在一个指定的位置触发输出信号的线性运动
StepBwdPath
在 RESTART 的事件程序中进行路径的返回
TriggStopProc
在系统中创建一个监控处理,用于在 STOP 和
QSTOP 中需要信号复位和程序数据复位的操作
TriggSpeed
定义模拟输出信号与实际 TCP 速度之间的配合
4、出错或中断时的运动控制
StopMove
停止机器人运动
StartMove
重新启动机器人运动
StartMoveRetry
重新启动机器人运动及相关的参数设定
剩余19页未读,继续阅读
1364 浏览量
点击了解资源详情
点击了解资源详情
2023-07-11 上传
104 浏览量
111 浏览量
2021-10-11 上传
2021-10-03 上传
2023-09-16 上传

智慧安全方案
- 粉丝: 3847
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







