Robcad全面教程:从基础到高级应用
需积分: 10 19 浏览量
更新于2024-07-22
1
收藏 2.87MB PPT 举报
"Robcad基础知识介绍"
Robcad是一款强大的机器人工作单元仿真软件,主要用于多设备的机器人和自动化流程的离线设计、仿真、优化和验证。它涵盖了点焊、弧焊、切割和喷漆等多个工业应用领域。软件的主要功能包括工作单元的三维布局、多个机器人的精确同步仿真以及自动优化工具,如路径规划、设备选择和冲突检测。通过Robcad,用户可以在项目早期发现并解决潜在问题,确保程序符合企业标准,并能准确地将机器人程序下载到实际生产线,提高生产质量和效率。
在文件格式方面,Robcad主要使用两种文件类型。首先是`.co`文件,这是一种由3D数模组成的文件,通常通过CATIA、UG等CAD软件转换生成。`.co`文件是Robcad的基础输入,用于构建仿真环境。然后是`.ce`文件,它是仿真运行后生成的结果,包含工作单元的布局、运动关系以及机器人的程序细节。文件转换在不同软件间协同工作时尤为重要。
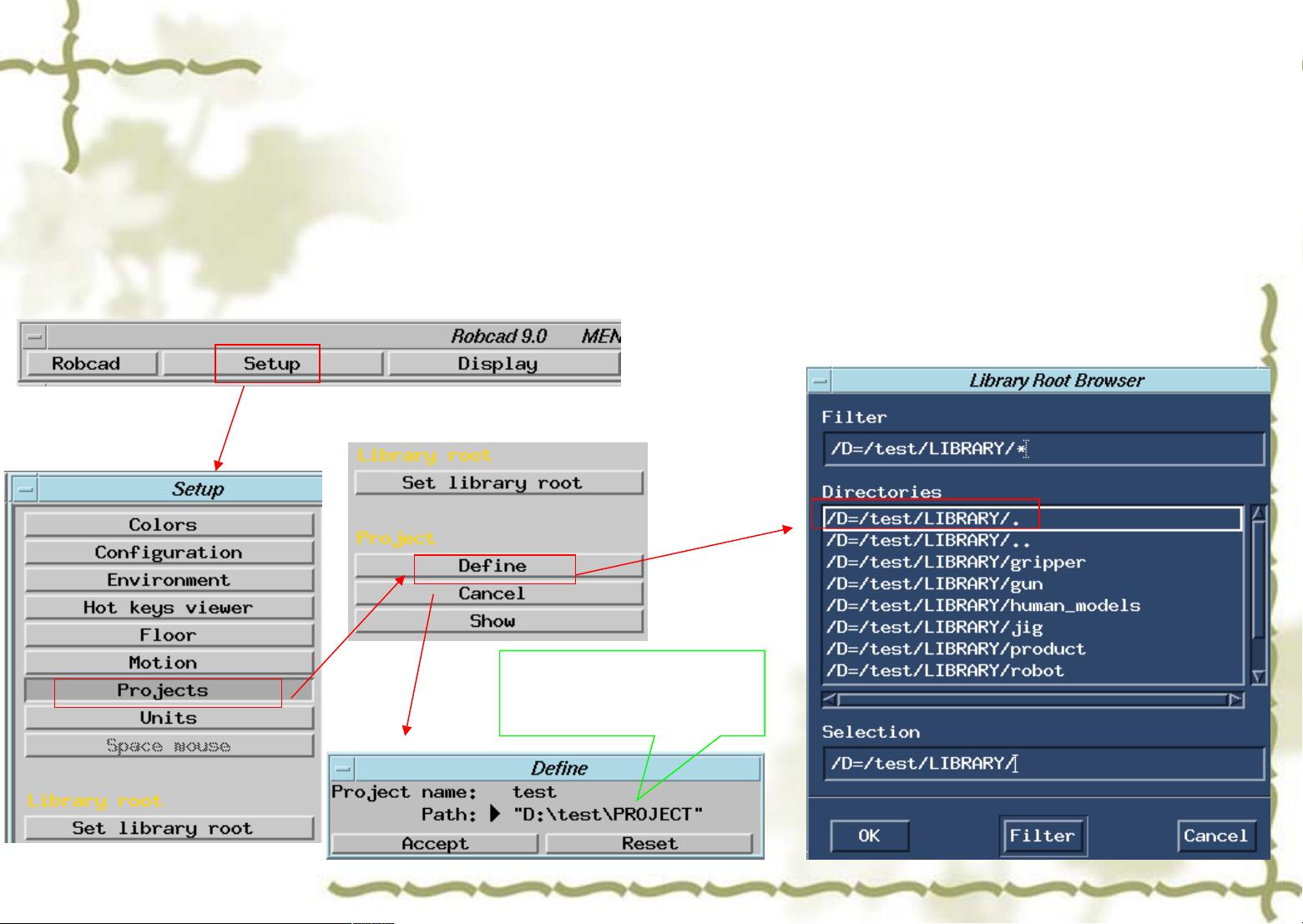
创建项目文件时,用户需要建立一个以项目名称命名的文件夹,该名称可以由英文字母、下划线或数字组成。项目文件结构是组织资源和数据的关键,确保了工作的条理性和可管理性。
在Robcad的培训内容中,第一天涉及资源布局、通用功能模块、信息窗口和工作单元状态窗口。这些内容帮助用户熟悉软件界面和基础操作。第二天,用户将学习到视图管理器、注释编辑器、层级管理、自动放置、碰撞设置和视图中心等工具的使用。第三天,重点转向Motion模块,包括运动仿真、机器人手动操作、关节手动操作、姿态设定、设置以及可达性分析。第四天,Modeling模块介绍了基本概念,如何加载数模,创建链接、轴、关节和帧,以及定义TCP和焊钳。第五天和第六天深入Spot模块,涉及焊钳和工装运动、资源加载、焊点处理、枪搜索和路径编辑。第七天,用户将学习固定式点焊和7轴机器人的应用。最后,第八天讲解数据转换,确保不同系统之间的兼容性。
Robcad提供了一个全面的平台,从设计到仿真,再到程序优化,覆盖了机器人自动化流程的各个环节,是工业4.0时代不可或缺的工具。通过深入学习和掌握Robcad,工程师可以高效地设计和优化机器人工作单元,提升制造业的自动化水平。

二、文件格式及转换
1. co 文件:
co 文件由文件夹组成,一般可通过 CATIA 或 UG 等软件转换生成, co 文
件是 Robcad 所调用的基本文件,一个 co 文件既是一个三维数模。
2. ce 文件:
仿真生成后的文件即 ce 文件, ce 文件也是一个文件夹,它记录了工作
单元的三维布局、运动关系和机器人的程序等信息。
3. 文件转换
剩余63页未读,继续阅读
2014-03-15 上传
2023-04-18 上传
2015-01-20 上传
点击了解资源详情
184 浏览量
2014-09-17 上传
2013-05-06 上传
2015-09-09 上传

qq_23222663
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
