CAR-Net:利用递归网络进行路径预测
162 浏览量
更新于2024-06-20
收藏 2.47MB PDF 举报
"CAR-Net是一种递归神经网络,专门用于智能体的路径预测,结合了行为历史和静态场景上下文信息。该框架旨在理解和利用环境中影响智能体导航的语义元素,尤其关注静态场景对轨迹预测的影响。"
CAR-Net(千里眼递归网络)是一个创新的预测框架,其设计目的是通过考虑智能体的历史行为和它们所处的静态导航环境,来预测未来的路径。这一框架主要基于两个关键信息来源:一是智能体过去的运动轨迹,二是导航环境的鸟瞰图图像。通过CAR-Net,模型学习在大图像中聚焦于哪些区域以提高预测精度,特别是在像道路交叉口这样的关键点。
该网络的独特之处在于它的“千里眼”注意力机制,允许模型关注原始图像中的任意区域或组合区域,从而识别出影响预测的细粒度语义元素。为了验证这种空间因素对智能体轨迹的影响,研究人员创建了一个包含数百个一级方程式赛车赛道顶视图图像的新数据集,这些赛道上的智能体行为受到特定图像区域(如即将到来的弯道)的显著影响。
在实验中,CAR-Net不仅成功地定位并重视了这些关键区域,还在标准的轨迹预测基准——斯坦福无人机数据集(SDD)上实现了最先进的准确性。此外,CAR-Net的多源注意力机制使其能够在处理动态和静态信息的同时,有效预测智能体的未来轨迹。
路径预测在自动驾驶、社交机器人导航等多个领域有着广泛的应用。传统的路径预测方法可能侧重于动态信息,如其他代理的运动,但CAR-Net强调了静态环境上下文的重要性。通过理解智能体与周围空间的复杂交互,CAR-Net将这些交互编码到预测模型中,提升了预测的准确性和解释性。
总结来说,CAR-Net是一种先进的路径预测技术,它结合了智能体的行为历史和静态环境信息,通过递归网络和自注意力机制,有效地预测智能体的未来轨迹,并在此过程中展示了对关键场景元素的敏锐洞察。这种技术对于提升自动驾驶和机器人导航系统的安全性与效率具有重要意义。
4
A.萨代吉安等人
A={
}
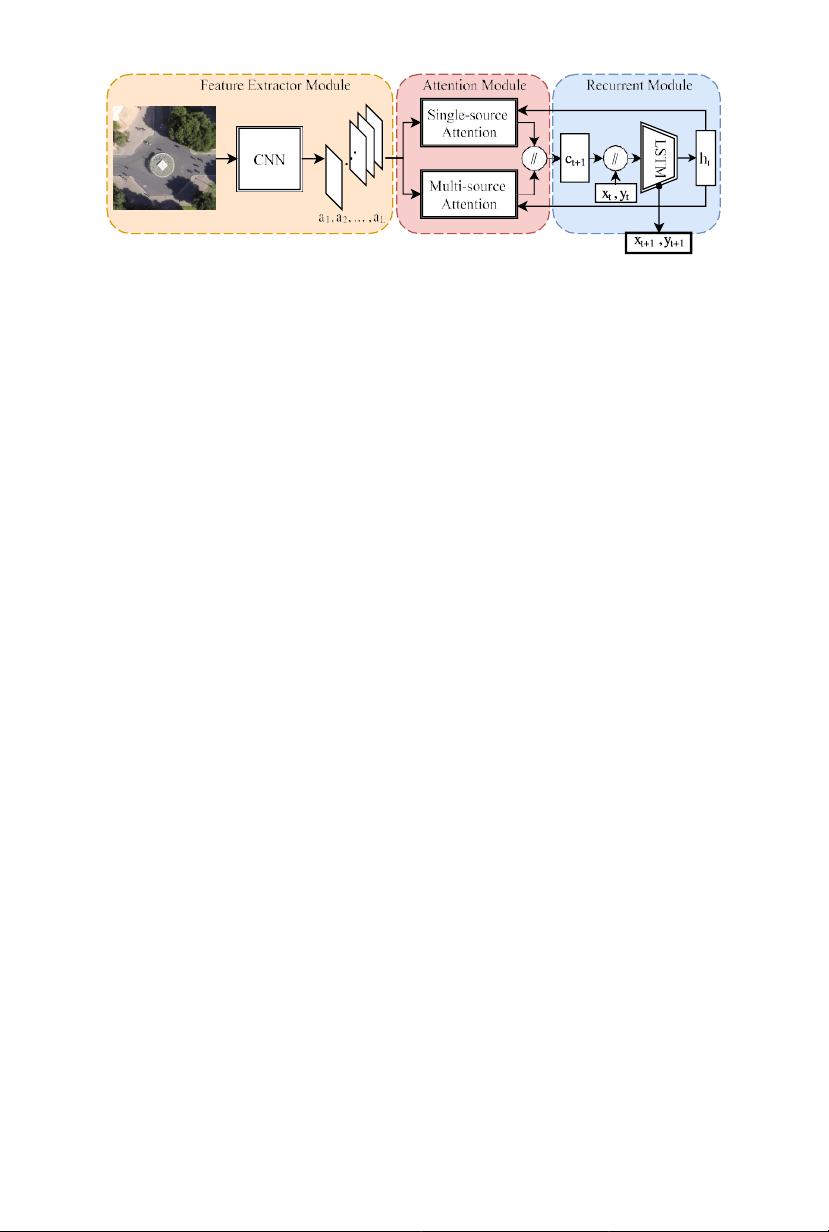
图二. CAR-Net架构概述。注意,
视觉注意。Xu和Gregor [17,23]的相关工作介绍了基于注意力的模型,该模型
学习关注与感兴趣的任务相关的突出对象Xu等人[17],提出了注意整个图像的
软注意力和硬注意力机制软注意力将权重掩码应用于图像的特征图。由于相关
的训练操作是可微的,因此它已被应用于广泛的任务。硬注意机制是不可区分
的,必须通过强化学习来训练这种方法的不可微性导致了很少的应用。
其他注意力模型将降维应用于图像。他们的目标是通过一系列局部的图像来
积累信息。在[21]中引入的它已被用于许多任务,如数字分类和个人识别[39,
23,40]。视觉注意力模型也被广泛应用于许多其他应用,如图像分类[41],图
像字幕[17,42]和视频分类[43]。受这些工作的启发,我们特此在我们的模型中
使用视觉注意机制来执行轨迹预测。
3
车联网
场景上下文对于预测智能体的未来行为是必要的。例如,一个骑自行车的人在
接近环形交叉路口时改变他的路线以避免碰撞。轨迹的这种偏差不能仅通过观
察智能体的过去位置来预测。这促使我们建立一个模型,可以利用可观察的场
景上下文,同时预测代理的未来路径。我们介绍了CAR-Net,这是一种基于深
度注意力的路径预测模型。它使用场景的原始顶视图图像和代理的过去轨迹来
执行轨迹预测。CAR-Net能够处理输入图像中最相关的部分。在本节中,我们
首先描述模型的整体架构然后,我们解释我们的视觉注意力模块。
3.1
整体架构
我们的模型的目标是预测未来的路径的代理给定其过去的轨迹和俯视图的场
景。我们的模型使用
特征提取器
从原始图像中导出特征向量(图1)。2)的情
况。然后,
视觉注意力模块
计算表示在时间t要注意的图像的显著区域的上下文
向量
Ct
。最后,
剩余16页未读,继续阅读
2023-11-22 上传
2021-05-15 上传
2021-04-01 上传
2021-05-01 上传
2021-03-10 上传
2021-05-29 上传
2021-04-14 上传
点击了解资源详情
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
