并联机器人分析与控制:燕山大学黄真教授讲义
需积分: 50 13 浏览量
更新于2024-07-17
1
收藏 31.17MB PDF 举报
"这是一份关于多自由度并联机构分析与控制的教育资源,由哈尔滨工业大学的姜洪洲教授授课,主要关注并联机器人的理论和控制技术。这份资料可能是黄真教授的PPT,他是燕山大学机械工程学院的教授,是中国早期从事并联机器人研究的专家。课程包括32个学时的学习,考核方式是研究报告和报告展示的结合。参考资料包括黄真教授的《并联机器人机构学理论及控制》、王洪瑞教授的《液压6-DOF并联机器人操作手运动和力控制的研究》、J-P. Merlet的《Parallel Robots》以及Grigore Gogu的《Structural Synthesis of Parallel Robots》。"
本文主要讨论的知识点有:
1. **并联机器人**:并联机器人是一种具有多个自由度的机器人结构,其运动是由至少两个独立的驱动系统来实现,这些驱动系统通过连杆机构连接到末端执行器。它们在精度、速度和刚度等方面表现出色,常见于制造业、航空航天和医疗等领域。
2. **多自由度分析与控制**:课程的核心内容是理解并联机构的多自由度运动分析,包括位置、速度和加速度的计算,以及如何设计和实施有效的控制系统以实现精确的定位和动态性能。
3. **黄真教授的贡献**:黄真教授是中国并联机器人研究的重要先驱,他的著作《并联机器人机构学理论及控制》是这一领域的经典参考书,对学习者理解并联机器人的基本原理和控制策略有着重要指导意义。
4. **课程结构与评估**:课程设置为32个学时,考核不仅包括传统的研究报告,还强调报告展示,这旨在提升学生的实践能力和口头表达能力,使他们能更好地理解和应用所学知识。
5. **参考教材**:课程推荐的教材涵盖了国内外专家的研究成果,如J-P. Merlet的《Parallel Robots》提供了国际视角,而Grigore Gogu的著作则深入探讨了并联机构的结构综合,反映了该领域深厚的理论基础。
6. **教育与研究背景**:涉及的教育机构如哈尔滨工业大学和燕山大学,以及国际组织IFToMM(国际力学和机器科学促进联合会),展示了并联机器人研究的学术背景和国际交流的重要性。
通过深入学习这些知识点,学生可以掌握并联机器人的设计、分析、控制等关键技能,为未来在相关领域的工作或研究奠定坚实基础。

太空机器人
应用二——并联机器人
二进制驱动
应用二——并联机器人
应用二——并联机器人
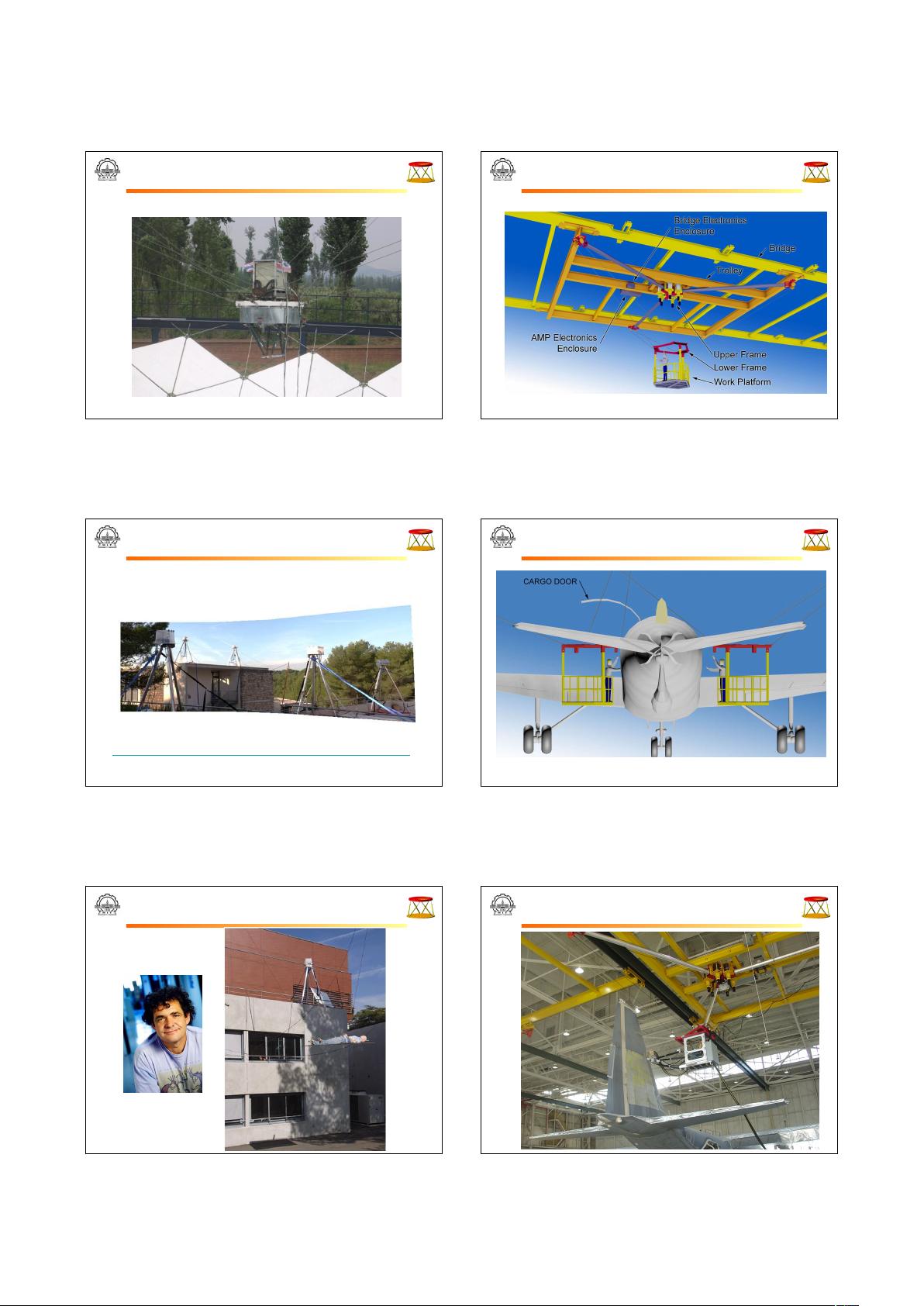
Designing a Stewart Platform-based Cooperative System for Large
Component Assembly
IEEE International Conference on Methods and Models
in Automation and Robotics, 2001
应用二——并联机器人
应用二——并联机器人
普通机床
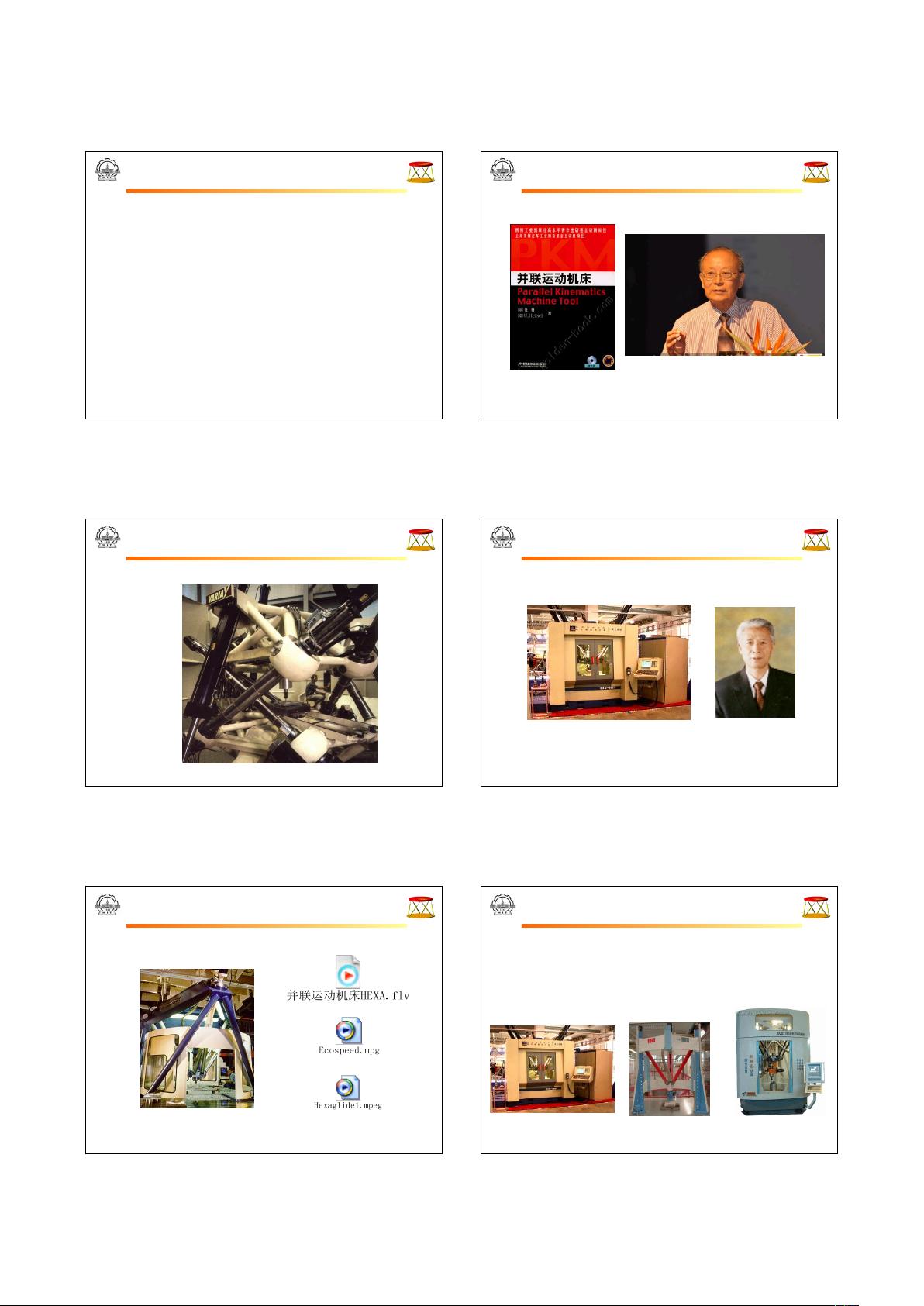
应用三——并联机床

剩余92页未读,继续阅读
2021-09-30 上传
2021-08-14 上传
2021-06-29 上传
2019-08-13 上传
2020-03-27 上传
2021-08-14 上传

zpl56465453
- 粉丝: 2
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
