高速EMCCD图像传感器CCD97时序驱动电路设计策略解析
183 浏览量
更新于2024-09-01
收藏 621KB PDF 举报
本文主要探讨了传感技术中一种高速EMCCD(Electron Multiplying Charge Coupled Device)图像传感器CCD97的时序驱动电路设计方法。EMCCD是一种高性能微光成像器件,它区别于传统CCD的关键在于其内置的电子增益技术。这种技术允许图像信息在电子转移过程中进行放大,即使在高读出速率下,也能保持较低的读出噪声,从而实现微弱光源下的高分辨率成像。EMCCD因其特性,在航天微光目标探测、生物医学成像、军事夜视系统等领域展现出巨大的应用潜力。
EMCCD驱动电路作为其应用的核心技术,其性能直接决定了最终成像的质量。文章列举了几种常见的驱动方法:
1. 直接数字电路驱动法:这种方法虽然易于实现,但逻辑设计复杂且调试困难,可能增加系统的不稳定性,因为需要较多的芯片。
2. MCU驱动法:通过编程微控制器(MCU)的I/O端口来控制驱动脉冲,这种方法灵活度高,可根据不同CCD调整程序,但对MCU工作频率要求较高,增加了硬件成本,且可能导致MCU效率降低。
3. EPROM驱动法:基于晶体振荡器、计数电路和可编程只读存储器(EPROM),结构简单,调试方便,但体积较大,难以处理复杂的时序需求。
4. 专用IC驱动方法:这是最常用的方法,通过专门设计的CCD集成电路来产生时序,具有高集成度、强大功能和操作简便的优点,特别适合于视频领域如摄像机及彩色CCD的应用。
选择哪种驱动方法取决于具体的应用场景、性能需求以及成本效益分析。设计高效、稳定的EMCCD时序驱动电路对于确保设备在各种极端条件下的稳定性能至关重要,因此在实际应用中需要根据实际情况进行深入研究和优化。
传感技术中的一种高速传感技术中的一种高速EM CCD 图像传感器图像传感器CCD97时序驱动电时序驱动电
路的设计方法路的设计方法
EMCCD ( E lectr on Mult iply ing Charg e Co upledDevice) 是新一代高质量微光成像器件。与传统CCD(
Charg e Coupled Device) 相比, 它采用了片上电子增益技术, 利用片上增益寄存器使图像信息在电子转移过
程中得到放大, 这使得它在很高的读出速率下仍具有相对很低的读出噪声, 能在微光源下高分辨力成像。
EMCCD的这些特性使其在航天微光目标探测、微光生命科学成像、军用高性能夜视探测等领域具有极大的应用
潜力。EMCCD 驱动电路是EMCCD 应用的核心技术, 其性能直接影响到成像质量。目前常用的时序产生方法
有以下几
EMCCD ( E lectr on Mult iply ing Charg e Co upledDevice) 是新一代高质量微光成像器件。与传统CCD( Charg e
Coupled Device) 相比, 它采用了片上电子增益技术, 利用片上增益寄存器使图像信息在电子转移过程中得到放大, 这使
得它在很高的读出速率下仍具有相对很低的读出噪声, 能在微光源下高分辨力成像。
EMCCD的这些特性使其在航天微光目标探测、微光生命科学成像、军用高性能夜视探测等领域具有极大的应用潜力。
EMCCD 驱动电路是EMCCD 应用的核心技术, 其性能直接影响到成像质量。目前常用的时序产生方法有以下几种:
( 1) 直接数字电路驱动法。这种方法原理简单, 容易实现。但是逻辑设计较复杂, 调试非常困难, 而且在实际电路中
因使用芯片较多, 为整个系统带来不可靠性。
( 2) MCU 驱动法。该方法是通过编程MCU 的I/ O端口来获得CCD 驱动脉冲信号的。这种方法的灵活性好, 精度也可
以很高, 对不同的CCD 器件只需要修改程序即可。由于CCD 的驱动频率为MHz 级, 使得选用MCU 器件的工作频率必须很
高( 提高了硬件成本) , 同时因频繁的中断和任务调度使MCU 效率很低。
( 3) EPROM 驱动法。这种驱动电路一般由晶体震荡器、计数电路和EPROM 存储器构成。这种驱动时序产生方法,
结构简单、明确, 调试容易, 缺点是结构尺寸太大, 对于实现复杂的驱动时序有较大困难。
( 4) 专用IC 驱动方法。这种方法就是利用CCD专用IC 来产生时序, 集成度高, 功能强, 使用方便。对摄像机等视频
领域应用的CCD 或三元彩色CCD, 这种驱动方法是首选。一般由相应的CCD 厂家提供。
另一种更有效的方法就是使用CPLD, FPGA 等大规模可编程逻辑器件实现。通过对该逻辑器件的编程,能实现任意复杂
的时序逻辑, 且调试方便, 只使用一片集成电路以及少数外围器件, 故可靠性高。本文即采用这种方法, 实现了CCD97 所
需的12 路驱动时序。
1 CCD97 简介简介
CCD97 是E2V 公司的背照式低照度CCD 图像传感器, 有效像素512 × 512, 像素大小16 μm × 16 μm, 它是帧转移型
CCD, 芯片采用反向输出模式抑制暗电流,其灵敏度高, 噪声控制方面精益求精, 由于采用新的输出放大电路, 使它能在11
MHz 的像素读出速率下, 以低于1 电子/ 像素的超低噪声工作, 其量子效率高达92. 5%。它获取图像速度快, 具有正常CCD
和EMCCD双读出模式。在微光成像系统中更具有优越性, 能实现真正意义上的24 h 实时监控。
2 驱动电路的设计驱动电路的设计
2. 1 CCD97 驱动电路的要求驱动电路的要求
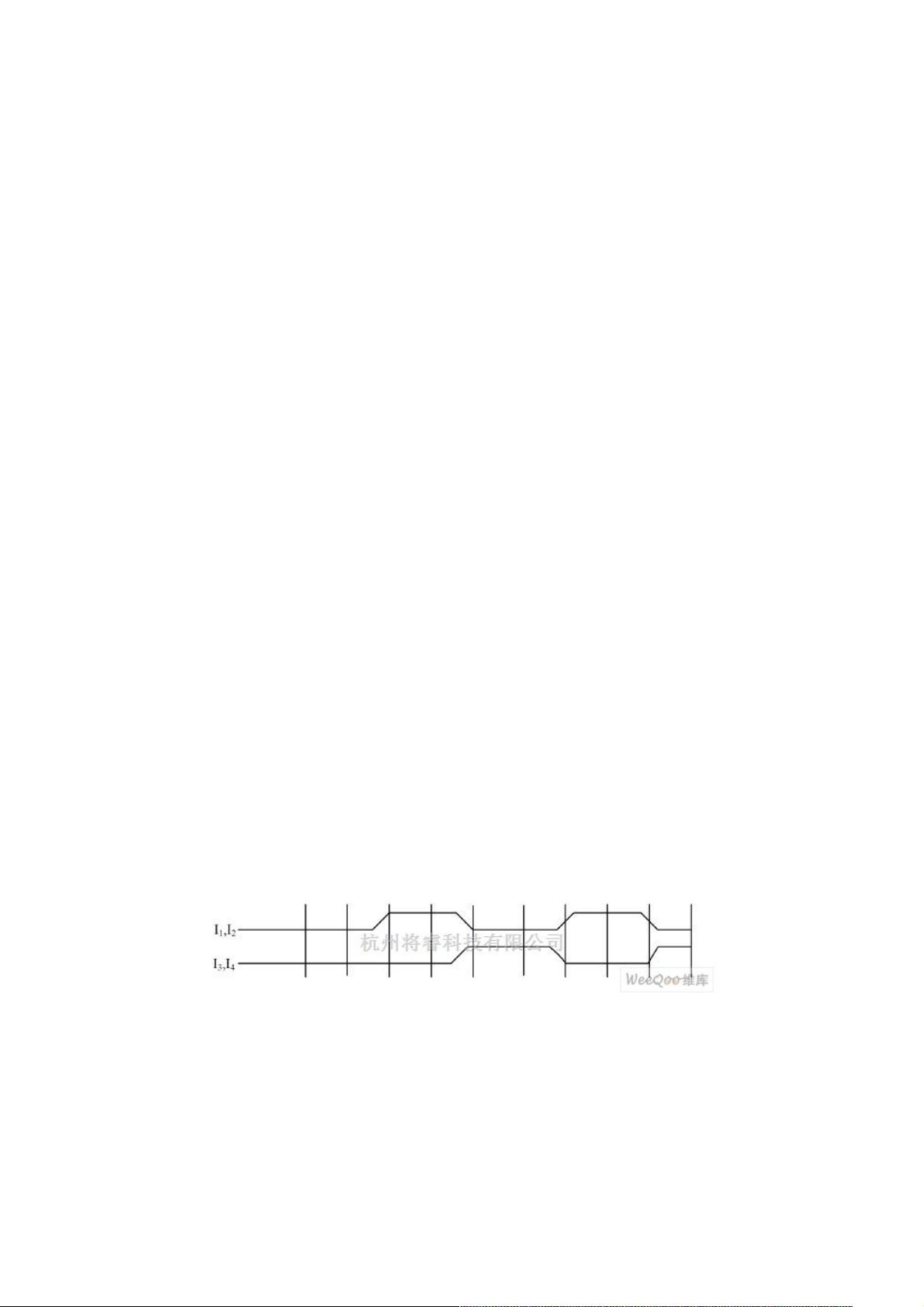
成像区向存储区的转移波形如图1 所示。
图1 成像区向存储区的转移波形
信号电荷在增益寄存器中的转移波形如图2 所示。
图2 为信号电荷在增益寄存器中的转移波形, 转移脉冲RΦ2HV 的高电平必须先于RΦ1 和RΦ2 到达, 同时RΦ1 和RΦ2
需要交替变化。
下载后可阅读完整内容,剩余7页未读,立即下载
2009-06-16 上传
2021-07-13 上传
2020-10-23 上传
点击了解资源详情
2020-11-13 上传
2020-12-13 上传
2020-11-09 上传
2020-11-08 上传
2020-11-10 上传

weixin_38732277
- 粉丝: 7
- 资源: 880
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
