"基于单片机的智能小车控制本科毕设论文:实现自动避障智能模型车系统"
24 浏览量
更新于2024-01-30
1
收藏 9.97MB DOC 举报
基于单片机的智能小车控制本科毕设论文详细介绍了一种基于51单片机的自动避障智能模型车系统。本设计旨在利用现代电子产品的智能化趋势,实现一种可以按照预先设定的模式在一个环境里自动运作的智能小车,不需要人为的管理。通过采集红外传感器所获取的路况信息,并对检测信息进行分析,系统能够自动控制转向电机,改变行驶路径,绕过障碍物,从而实现车稳定避障。
在摘要部分,本设计首先对智能化作为现代电子产品的新趋势进行了介绍。智能化设计的电子产品可以应用于科学勘探、环境监测、智能家居等方面。接着论文详细介绍了基于单片机的智能小车控制的设计理念和实现方法。通过对红外传感器采集路况信息的分析和对转向电机的控制,智能小车可以稳定地避开障碍物,实现自动化的运行模式。同时,本课题设计的智能小车还具备其他功能,如遥控、遥测、数据传输等等。此外,本论文还对智能小车的发展前景进行了展望,并提出了一些改进意见和未来研究方向。
在正文部分,本论文首先对基于单片机的智能小车控制的设计理念进行了详细阐述。随后,论文详细介绍了系统的硬件设计和软件设计。在硬件设计方面,包括电路结构设计、传感器的选择和连接、马达的选型等方面。在软件设计方面,详细介绍了程序的设计和实现过程,包括采集路况信息、分析信息、控制转向电机等方面。通过对硬件和软件的详细设计,系统能够准确地采集路况信息,并作出相应的控制动作,实现了整个智能小车控制系统的自动化运行。
在结尾部分,本论文对整个设计的成果进行了详细展示和总结。通过实验数据的分析,论文验证了智能小车控制系统的有效性和稳定性。同时,论文指出了一些设计中存在的问题和需要改进的地方。最后,本论文对未来基于单片机的智能小车控制研究方向进行了展望,包括更加智能化的控制系统、更加灵活多样的应用场景等方面。
通过对基于单片机的智能小车控制系统的设计、实现和展望的详细介绍,本论文为相关领域的研究和开发工作提供了有益的参考和借鉴。同时,论文的设计和实验过程也为读者提供了一种全面系统的科研方法和技术手段。希望本论文的设计成果能够在智能化电子产品领域取得更多的实际应用和推广,为现代电子产业的发展做出更大的贡献。
江苏理工学院毕业论文(说明书)
第 5 页 共 56 页
2.2.1 STC89C52RC 简介
常用的单片机有很多种:Intel8051 系列、Motorola 和 M68HC 系列、Atmel
的 AT89 系列、台湾华邦(Winbond)W78 系列、荷兰 PiliPs 的 PCF80C51 系列、
MicrochiP 公司系列 4 位单片机、台湾义隆的 EM-78 系列等
[1]
。本次设计最终选
用了 STC89C52 单片机。
本系统采用最常用的 STC89C52 单片机,它是一种带 4K 字节闪烁可编程可擦
除 只 读 存 储 器 ( FPEROM—Falsh Programmable and Erasable Read Only
Memory)的低电压,高性能 CMOS 8 位微处理器。该器件采用 ATMEL 高密度非易
失存储器制造技术制造,与工业标准的 MCS-51 指令集和输出管脚相兼容。由于
将多功能 8 位 CPU 和闪烁存储器组合在单个芯片中,ATMEL 的 STC89C52 是一种
高效微控制器。STC89C52 单片机为很多嵌入式系统提供了一种灵活性高且价廉
的方案。
[6]
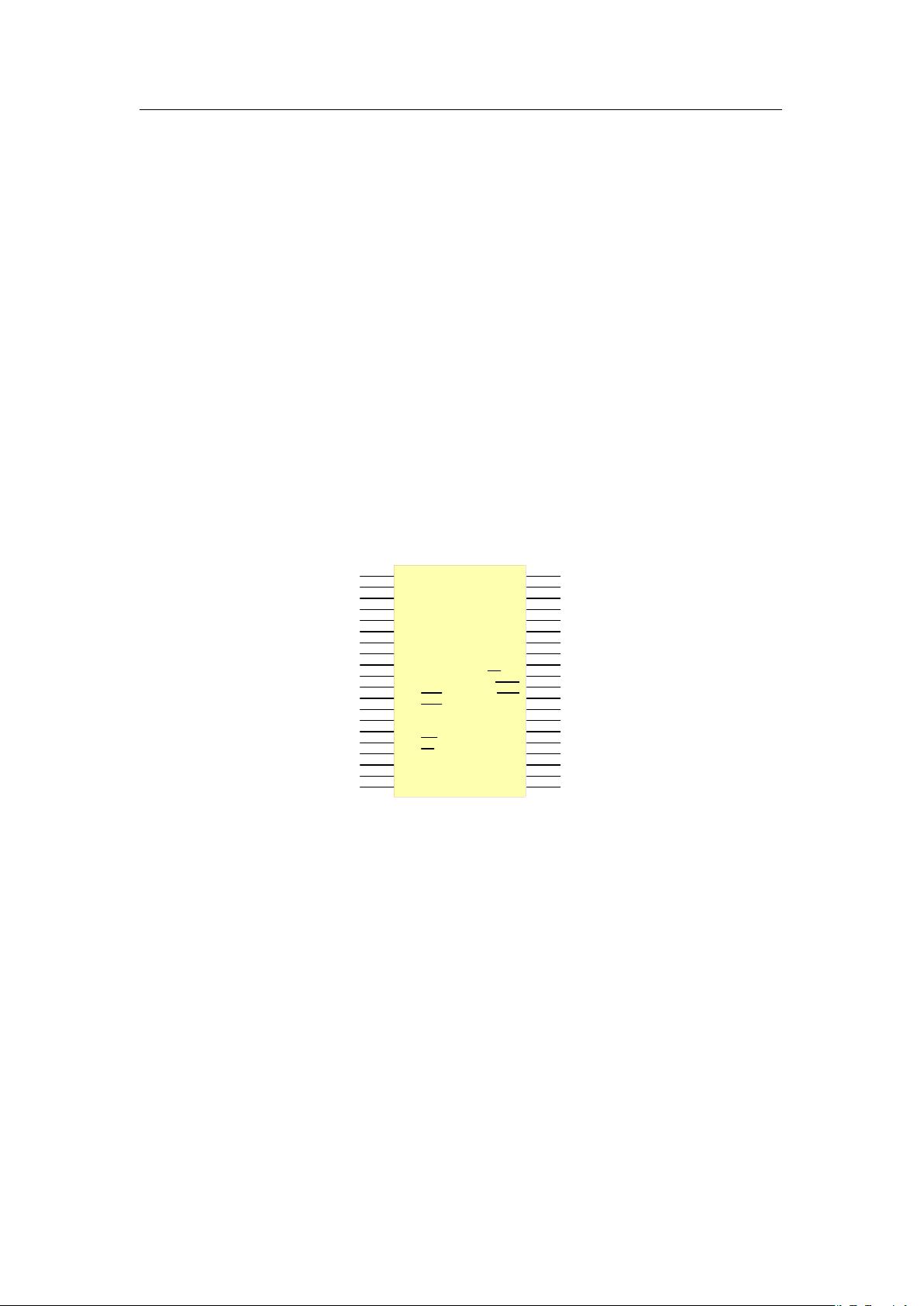
引脚排列如图 2-3 所示。
图 2-3 STC89 系列引脚排列
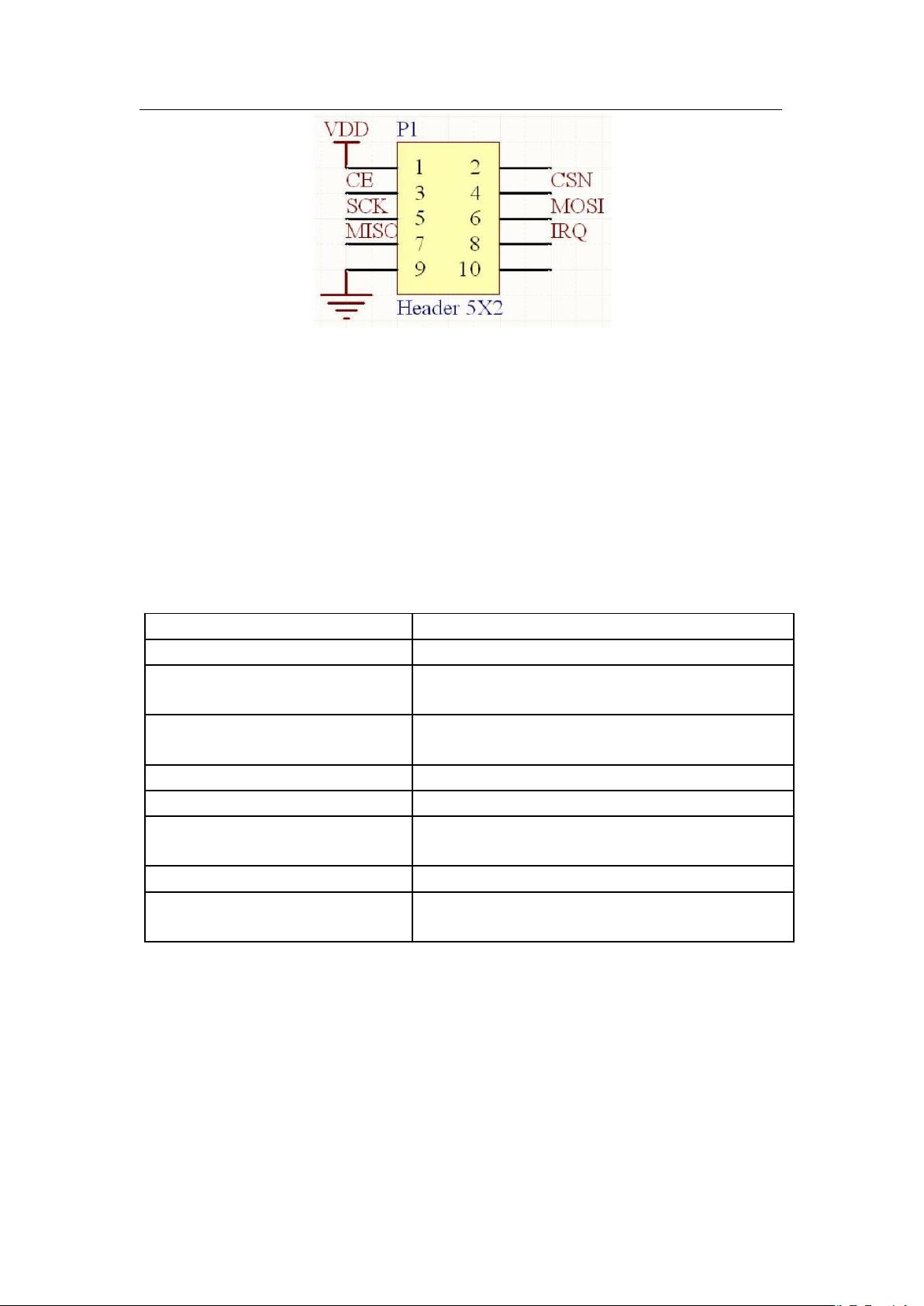
2.2.2 NRF24L01 无线收发芯片简介
NRF24L01 是一款工作在 2.4-2.5GHz,世界通用 ISM 频段的单片无线收发器
芯片。无线收发器包括:频率发生器、增强型 SchockburstTM 模式控制器、功率
放大器、晶体振荡器、调制器、解调器。输出功率、频道选择和协议的设置可通
过 SPI 接口进行设置。极低的电流消耗:当工作在发射模式下发射功率为-6dBm
时电流消耗为 9mA,接收模式时为 12.3mA。掉电模式和待机模式下电流消耗更低。
NRF24L01 引脚排列如图 2-4 所示。
P1.0
1
P1.1
2
P1.2
3
P1.3
4
P1.4
5
P1.5
6
P1.6
7
P1.7
8
RES
9
P3.0(RXD)
10
P3.1(TXD)
11
P3.2(INT0)
12
P3.3(INT1)
13
P3.4(T0)
14
P3.5(T1)
15
P3.6(WR)
16
P3.7(RD)
17
XTAL2
18
XTAL1
19
GND
20
P2.0(A8)
21
P2.1(A9)
22
P2.2(A10)
23
P2.3(A11)
24
P2.4(A12)
25
P2.5(A13)
26
P2.6(A14)
27
P2.7(A15)
28
PSEN
29
ALE/PROG
30
EA/VPP
31
P0.7(AD7)
32
P0.6(AD6)
33
P0.5(AD5)
34
P0.4(AD4)
35
P0.3(AD3)
36
P0.2(AD2)
37
P0.1(AD1)
38
P0.0(AD0)
39
VCC
40
AT89C51
1A
89C51
剩余59页未读,继续阅读
120 浏览量
点击了解资源详情
107 浏览量
2023-07-01 上传
2023-06-29 上传
305 浏览量
2023-07-01 上传
2023-07-09 上传
2023-07-09 上传

yyyyyyhhh222
- 粉丝: 464
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- VS2019+Qt+opencv.pdf
- pacificstore-typegen
- Troya-PWA-Live:Troya-PWA存储库的已部署应用程序。 播出!! 居住!
- ReactExcercise
- PhysicsExp:USTC Physics Experiments Data Processing Tools (大物实验数据处理工具)
- numpy-1.16.0+mkl-cp36-cp36m-win_amd64.zip
- 企业文化与人力资源DOC
- CS4550-HW07
- 商城竖直导航菜单样式
- 食品订单
- ULINK2升级包_1.42和2.03综合版.zip
- Network Activator (TRIAL105)-crx插件
- BaiduMapSpider:百度地图POI数据抓取
- 某公司企业文化建设规划
- torch_cluster-1.5.7-cp36-cp36m-win_amd64whl.zip
- nova59
