工业机器人装配工作站:从入门到实践
版权申诉
134 浏览量
更新于2024-06-23
收藏 7.7MB DOCX 举报
"初级教程机器人搬运打螺丝工作站教材"
该文档是针对初学者设计的一份详细教程,旨在介绍工业机器人在装配工作站中的应用,特别是如何进行现场编程和操作。主要涵盖了以下几个方面的重要知识点:
1. **工业机器人基本知识**:在任务一开始,教材介绍了工业机器人的基本概念,包括其在自动化生产中的作用,以及它们如何被用于搬运和打螺丝等任务。
2. **三菱RV-7F-D机器人**:作为示例使用的机器人型号,文档详细讲解了这款机器人的特性,如它的结构、功能和适用范围,让学生对具体型号的机器人有深入理解。
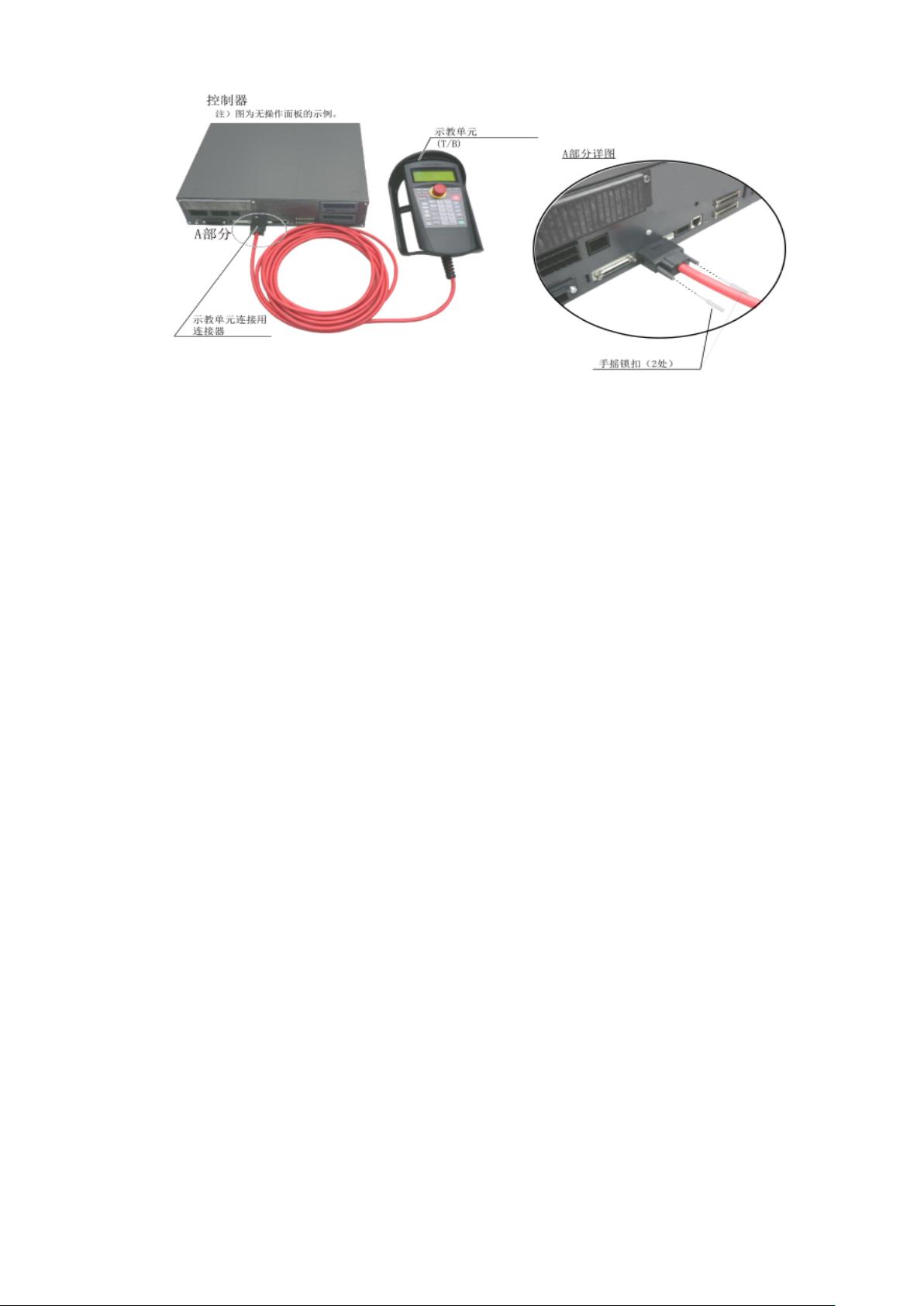
3. **机器人启动和停止的操作**:这部分强调了安全操作的重要性,详细说明了如何正确接通主电源,连接外部紧急停止装置,以及如何操作CR751控制器和示教单元。
4. **示教编程器的使用**:任务三详细阐述了三种示教方法,包括示教再现、离线编程和基于虚拟现实的编程方式,并且详细介绍了三菱RV-7F示教编程器的功能键和操作界面。
5. **模拟仿真工作站**:这部分教学如何在SolidWorks中进行三维建模,包括插入机器人模型、导入其他工作站模型,以及爪手设计和组装。同时,还介绍了如何使用RTToolBox2进行在线编程,包括点位示教和复杂编程。
6. **机器人工作站搭建**:详细介绍了电气元件的准备、输入输出接口的接线、工件准备以及如何通过RTToolBox2进行点位示教,以实现工作站的完整功能。
7. **PLC控制**:项目中提到了可编程逻辑控制器(PLC)的基础知识,包括其构成和工作原理,以及如何使用三菱PLC控制机器人启动。进一步,教程解释了如何利用组态王软件远程控制PLC,从而间接控制机器人的启停。
8. **学习和能力目标**:教材明确了学生在学习本项目后应达到的熟悉程度,包括了解机器人的基本应用、工作站构成、示教器操作、坐标系知识和安全操作规程。同时,也设定了能力目标,如选择合适机器人型号、选取坐标系、手动操作机器人等。
这份教材是学习工业机器人操作和编程的理想入门资料,适合初学者逐步掌握机器人工作站的配置、编程和安全操作。通过完成一系列任务,学习者可以积累实践经验,提升在实际工作环境中应用机器人技术的能力。


2022-07-10 上传
2023-07-12 上传
2023-04-16 上传
2022-11-30 上传
2022-05-31 上传
2022-11-03 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
