直线二级倒立摆控制问题的研究与仿真分析
97 浏览量
更新于2024-04-14
收藏 1.53MB DOC 举报
In recent years, the control problem of the linear two-link inverted pendulum has been widely researched by scholars. This system serves as a typical device for testing the effectiveness of various new control theories and methods due to its characteristics of being a multi-variable, non-linear, strongly coupled, and fast-moving high-order unstable system.
This research paper focuses on the control problem of the linear two-link inverted pendulum. Firstly, it outlines the research development and current status of control for inverted pendulum systems. It then introduces the structure of the inverted pendulum system and elaborates on the mathematical model of the two-link inverted pendulum. Different controllers were designed using pole placement and LQR optimal control methods. Through comparison and MATLAB simulations, the effectiveness, stability, and disturbance rejection abilities of the designed controllers were verified.
Keywords: Inverted pendulum; Pole placement; Optimal control; MATLAB; Simulation.
河南理工大学毕业设计(论文)说明书
10
第二章 直线二级倒立摆数学模型的建立
现代控制理论是基于状态空间法进行分析的,因此首先要建立系统的
状态空间方程。本章从二级倒立摆的物理结构出发,通过对其进行受力分
析和运动描述,对比两种建立数学模型的方法:牛顿力学分析方法、欧拉
-拉格朗日原理(拉格朗日方程)的优缺点,并选定欧拉-拉格朗日原理(拉
格朗日方程)对系统进行详细的数学建模,并进行必要的线性化处理和初
步的系统原理分析。
2.1 倒立摆系统的物理结构及特性分析
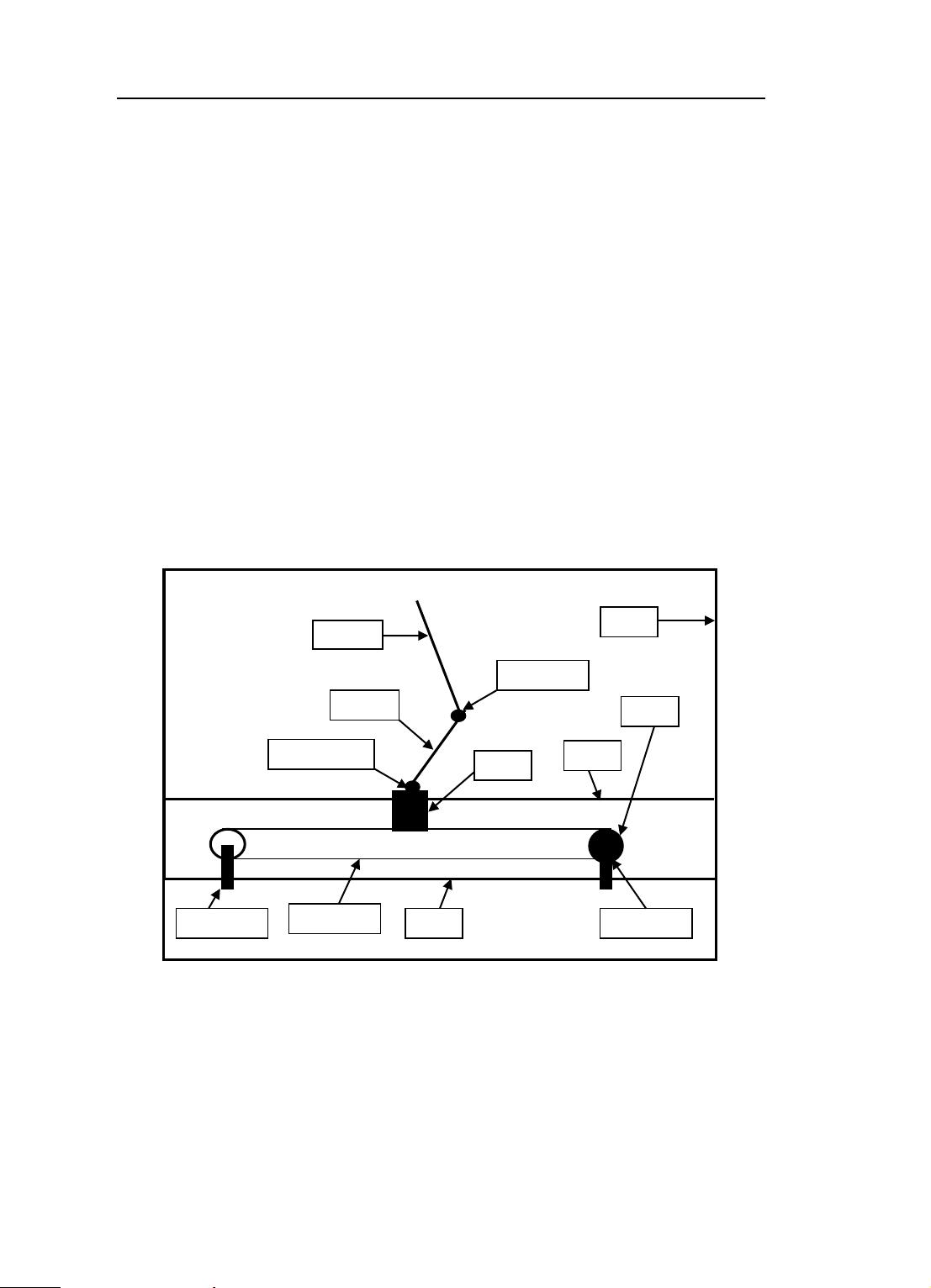
本次仿真设计的二级倒立摆模型系统由机械部分和电路部分组成。机
械部分包括底座,框架,滑轨,直流永磁式力矩电机,测速电机,电位器,
齿型传动皮带,小车,摆杆,触发开关以及一些连接轴等。主要机械结构
部分如图2-1所示。
2-1 直线二级倒立摆的物理结构图
对直线二级倒立摆控制系统而言,将功率放大器、力矩电机、小车、
摆、皮带及皮带轮等的组合体视为控制对象,其输入是功率放大器的输入
信号,输出是小车的位移和摆杆的角度。对直线二级倒立摆这个典型的机
上 摆 杆
下 摆 杆
测角电位器
测 角 电 位 器
小 车
滑 轨
框 架
电 机
水平调节栓
伪形传送带
底 座
测位电位器


剩余56页未读,继续阅读
2022-07-09 上传
2022-07-10 上传
2023-06-28 上传
2023-07-08 上传
2023-07-05 上传
2023-07-09 上传
2023-07-05 上传

智慧安全方案
- 粉丝: 3834
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
