STM32驱动的蓝牙平衡车控制系统设计
需积分: 10 32 浏览量
更新于2024-07-09
收藏 2.45MB PDF 举报
"基于STM32的蓝牙平衡车设计,利用STM32F103C8T6微控制器,MPU-6050传感器,TB6612FNG电机驱动器和BT-04蓝牙模块实现。采用PID控制进行角度和速度环的稳定,通过互补滤波处理传感器数据,通过手机APP实现远程控制。"
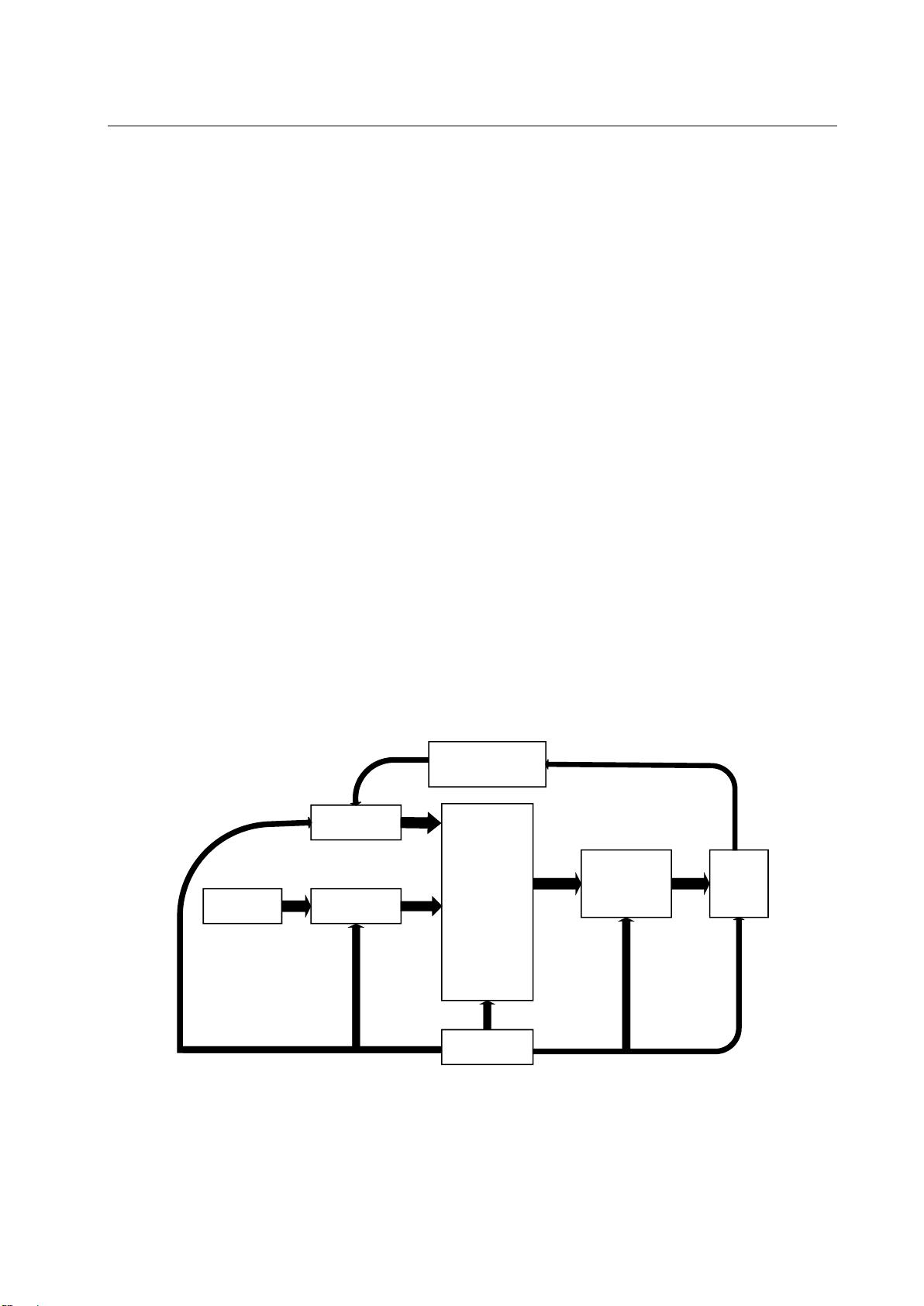
本文探讨了一种基于STM32单片机的蓝牙平衡车设计方案,其核心控制器采用了意法半导体的STM32F103C8T6芯片。STM32系列微控制器因其高性能、低功耗和丰富的外设接口,在嵌入式系统设计中广泛应用。在这个项目中,它负责处理整个系统的控制逻辑和数据处理。
平衡车的核心组件包括MPU-6050运动传感器,该传感器集成了三轴加速度计和三轴陀螺仪,能实时监测平衡车的姿态变化。TB6612FNG是一款高效的直流电机驱动器,能够精确控制电机的旋转速度和方向,确保车辆的平稳行驶。同时,BT-04蓝牙模块用于建立与智能手机的无线连接,使得用户可以通过手机应用程序(APP)远程控制平衡车。
在控制算法上,文章重点介绍了PID(比例-积分-微分)控制的应用。PID控制是自动控制理论中的经典方法,用于调整系统的响应性能。在平衡车上,PID控制器被用来实现两个关键功能:一是角度环控制,通过比例和微分成分实时调整电机转速,使车辆保持直立;二是速度环控制,采用比例和积分控制来精确控制车辆的前进、后退和转向速度。
互补滤波是处理传感器数据的关键技术,它能有效融合来自加速度计和陀螺仪的测量值,提高姿态估计的精度。在实际应用中,需要根据车辆特性和环境条件对PID参数进行精细调校,以达到理想的动态性能和稳定性。
设计成果可以实现通过手机APP连接蓝牙控制平衡车的前进、后退、左右转动等动作,同时保持车辆的直立平衡。这样的设计不仅展示了STM32的强大控制能力,也为其他平衡车项目提供了有价值的参考思路和技术实现方案。
关键词:两轮平衡车,六轴运动传感器,直流电机驱动器,PID控制,互补滤波,蓝牙通信,STM32微控制器。

2
第 1 章 绪论
1.1 设计背景
1.1.1 国外发展情况
早在 80 年代后期,对平衡车相关领域技术开发就已经开始。当时,日本电气通信大
学的山藤教授申请了“平衡双轮机器人”专利。当时这个装置已经拥有了现代平衡车交通
工具之雏形,但是取决于那时计算机和传感器技术十分落后,有没有寻找到较为合适的应
用场景,因此当时这项发明并未引起广泛关注。在 21 世纪初,名为“Segway”的单人类
平衡车工具在美国问世。从此,自平衡交通工具研究在全世界范围内激发了广泛关注。
“Segway”采用 5 个陀螺仪来充当状态测量感测器,用以实时检测车辆的状态角度及
速度。每秒其采样过程甚至可以达到 5000 次,并由锂电池进行供电。使用过程中,使用
者只需要通过改变重心就能够使车辆启动、提速、降速、停止等动作。
图 1.1 双轮平衡车
1.1.2 国内发展情况
在国内,各个大学和企业对双轮平衡车也展开非常深入的研发,同时也获得了十分理
想的效果和市场认可。早在 2002 年,洛阳北方企业集团与河南科技大学共同研究,在平
衡车技术领域展开深入开发,利用拉格朗日方程建立数学模型,推导状态空间方程式,进
行了仿真和运行实验。2011 年 11 月,加入了双保险安全模块和限速系统的平衡车被上海
新世纪机器人有限公司推出
[18]
,其安全性得到了很大提高。在机场、海关、旅游景区、商
场等场合广泛使用,真正成为服务大众群体的交通工具。
本文希望给平衡车提供一种全新的设计思路。设计一款双轮平衡车系统,在受到外力
干扰情况下能自主恢复平衡,并且能通过手机 APP 在蓝牙操控下对其加速、减速、转向进
行操控。
1.2 未来发展前景

剩余58页未读,继续阅读
2021-06-24 上传
2021-06-30 上传
2021-06-26 上传
2021-06-27 上传
2021-06-26 上传
2022-01-17 上传
2021-10-16 上传
2019-09-03 上传
2021-09-21 上传

alltimehigh
- 粉丝: 186
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
