MATLAB模拟:水轮机调节系统与BP神经网络PID控制
版权申诉
193 浏览量
更新于2024-06-19
收藏 1.06MB PDF 举报
"基于MATLAB的水轮调节系统仿真与分析"
水轮发电作为可再生能源的重要组成部分,其工作原理是利用水流的能量驱动水轮机旋转,进而通过发电机转换为电能。水轮机调节系统是确保电能质量和电网稳定的关键环节,它需要维持发电机的转速在额定范围内,以保持电力系统的频率和电压稳定。由于水轮机调节系统本身的复杂性,包括高阶、时变和非最小相位的非线性特性,以及受到外部环境和内部动力学因素的影响,对其进行精确控制是一项挑战。
传统的PID(比例-积分-微分)控制器在许多工程应用中表现出色,但在应对水轮机调节系统的动态变化时,其固定参数可能无法提供最佳性能。为此,本论文提出了结合BP(Backpropagation)神经网络的PID控制策略,以实现在线自整定参数的能力。BP神经网络以其强大的非线性映射能力和学习能力,可以适应水轮机系统的不确定性,从而改善控制效果。仿真结果显示,BP神经网络PID控制模型在实际应用中表现出了良好的性能。
接下来,论文采用MATLAB/SIMULINK这一强大的仿真工具,对水轮机调节系统进行了模块化建模。SIMULINK允许构建复杂的动态系统模型,并能方便地分析系统参数对动态特性的影响。通过仿真,研究了主要参数如导叶开度、接力器位置等对系统响应的影响,有助于理解和优化系统的动态行为。
此外,论文利用水轮机的综合特性曲线,对流量、力矩等关键特性数据进行了三维插值建模,这有助于更精确地描述水轮机的工作状态。这种建模方法提高了模型的精度,为后续的控制策略优化提供了基础。
最后,建立了基于BP神经网络的PID控制水轮机调节系统模型,并在额定工况和限制工况下进行了频率扰动和负荷扰动的仿真实验。实验结果表明,BP神经网络PID控制在缩短调节时间、抑制超调和增强系统稳定性方面表现出优越的动态品质,对于提升水轮机调节系统的整体性能具有显著作用。
关键词:水轮机调节系统;BP神经网络;PID控制;仿真分析
本论文通过深入研究和仿真,为水轮机调节系统的控制策略优化提供了新的思路,特别是在应对复杂性和不确定性方面的改进,对于实际电力系统的稳定运行和效率提升具有重要的理论与实践意义。

基于 MATLAB 的水轮机调节系统仿真与分析
8
)2()1(2)()()1()()( kekekeKkeKkekeKku
dip
(
2-14
)
位置式 PID 控制采样时间是不变的,故仅仅需要求出 PID 控制参数以及系
统相邻时刻的误差,即可得到增量
)(ku
。
2.2
神经网络控制
神经网络是模拟人脑机能的处理系统。由于其拥有自学习能力、容错性好等
特点,故可以处理很多现实问题。学习规则、神经元特性及拓扑结构影响着神经
网络的性能。
2.2.1 神经网络的应用
神经网络在许多领域都被成功的应用,如:模式识别中、图像处理以及在控
制与优化、预测与管理等领域
[39]
。引入神经网络后能更好的解决这些领域中原来
难以处理或者无法处理的难题。
2.2.1.1
神经网络的发展
William James 在 1890 年历史性的给出了人工神经网络这一词汇,McCulloch
和 Pitts 在 1943 年用数学方法去研究神经细胞,随后建立了神经元模型
[40]
。
科学家 Hebb 在 1949 年利用其自身的实践结果,提出了 Hebb 学习规则
[41]
。
由此开创了一个新的世界。
Rosenblatt 在 1958 年根据 McCulloch 和 Pitts 建立的神经元模型发明了感知
器模型。该模型首次把神经网络应用到实际中
[42]
。Widrow 和 Hoff 在 1960 年建
立了自适应线性元件网络模型,提出了 Widrow-Hoff 学习规则
[43]
。
Minsky 和 Papert 在 1969 年,指出人工神经单层感知器的局限性
[44]
。
Hopfield 在 1982 年建立了 HNN 模型,将神经网络应用于工程中去处理优化
问题
[45]
。
Remelhart 和 Mcllelland 在 1986 年给出了并行分布处理方法,Werbos 和 Parker
给出了基于网络的 BP 算法
[46]
。
2.2.1.2
神经网络的特征
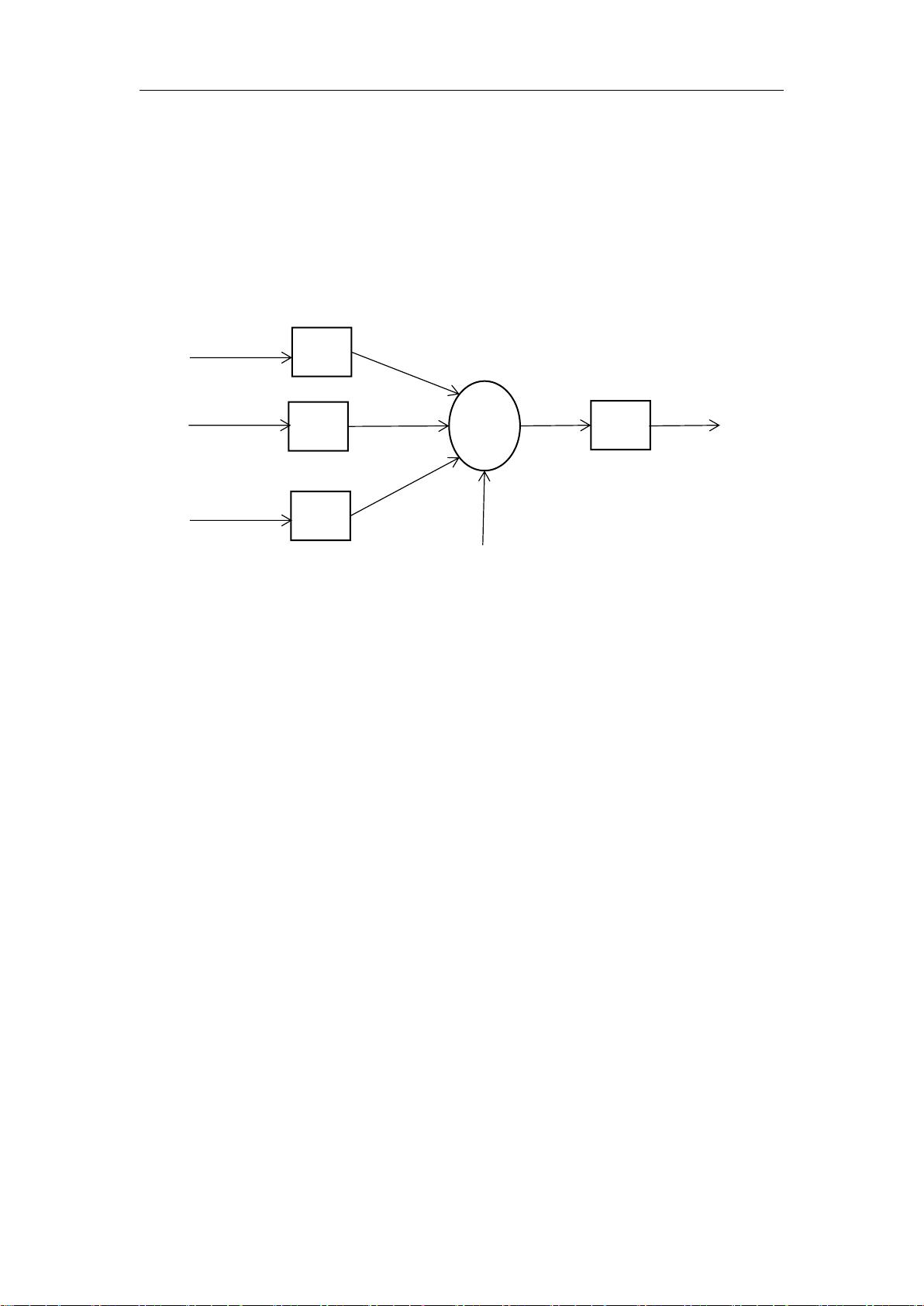
神经网络由相互连接的算法指导的神经元构成
[47]
,基于其自身的特点,神经
网络已成功的被引入到多种领域和方向去解决问题,并取得了很好的控制和调节
效果。其主要有以下几点特征:
(
1
)因为其由许多的神经元组成,再结合算法指导可以处理难以用规则或模型
描绘的复杂系统;
(
2
)并行处理能力强,每个神经元即可以接收上层所有神经元的输出,同时也
可以作为输入传给下层的每个神经元;
(
3
)容错性能好,出现某些输出出错不影响这个网络的性能;
剩余72页未读,继续阅读
257 浏览量
885 浏览量
106 浏览量
106 浏览量
2023-10-29 上传
2023-10-29 上传
2023-10-30 上传
2023-11-01 上传
2023-10-29 上传


icwx_7550592
- 粉丝: 20
- 资源: 7163
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易语言冰雪战歌音乐盒
- Buddy:基于Leancloud无限制的班级管理系统(学生迫害系统)(:wrapped_gift:也是我可爱的英语老师Buddy的圣诞节礼物)
- highline:将 Markdown 文档中的 GitHub 链接转换为代码块
- BinaryRelationPropertyAnalyser
- docker-sample
- 易语言二行代码显示flash
- 作品答辩环境工程系绿色环保模板.rar
- pyfasttext:fastText的另一个Python绑定
- Tanji-crx插件
- ASP+ACCESS学生管理系统(源代码+LW).zip
- 易语言企达鼠标精灵
- 20210806-华创证券-食品饮料行业跟踪报告:餐饮标准化解决方案暨大消费论坛反馈,川调火热东风至,智慧餐厅初萌芽.rar
- weatherapp
- yii2-semantic-ui:Yii2 语义 UI 扩展
- One_Click_Boom-ocb:一键式解决方案,用于设置大数据处理环境。 Installl是所有bash文件所在的父目录。 只需在终端中通过命令“ chmod 777 *”向位于installl目录内的所有bash文件提供权限
- CLAT Guru-crx插件
